In this paper we develop physics informed neural network model to solve battery technology. The first model uses physics from the theory. The voltage of the battery is related to the charge carrier, frequency term and power. The theory is used to obtain 15 different voltages. The parameters charge carrier, frequency term, power and voltage are our 15 training data. The training data is trained using Recurrent Neural Network (RNN) Long Short-Term Memory (LSTM). The algorithm determines the weight based on the training data. We study for 50, 100, 150, 200 and 500 epoch. We predict for 15 test cases. The predict file has variables [charge carrier given, frequency given, voltage not given and power given]. We obtain huge error when the training set is given as one file with 15 rows of 4 variables in each row. However the physics from the theory matches with the predict answer for the voltage when the training file has one row of 4 variables that is repeated to study multiple times. We have 15 different training files. We study for 50, 100, 150, 200 and 500 epoch. The dependency on the epoch is visible until 200. The accuracy is 95% for few predict test case results. The predict voltage correlates with the theory. Thus, the model is physics from theory included in the neural network for the first time. Next, we study the physics informed partial differential equation with the neural network. We use 15 training sets. Each training set have 10 rows with variables [grid location, concentration, voltage distribution, frequency term and current]. We use our model to test for one case. The test variables are [same grid location, 1 new concentration, predict the voltage distribution, same frequency term and same current]. We obtain good output matching the actual and the physics. The accuracy is 80%. We study for epoch 50.
| Published in |
Engineering and Applied Sciences (Volume 10, Issue 4)
This article belongs to the Special Issue Physics Informed Neural Network and Continuum Simulations to Measurements |
| DOI | 10.11648/j.eas.20251004.12 |
| Page(s) | 84-95 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
Physics Informed, Neural Network, Artificial Intelligence, Machine Learning, Battery Technology
Charge carrier (C) | Frequency term (Hz) | Voltage (V) | Power (W) |
|---|---|---|---|
3000 | 0.000278 | 119.9041 | 100 |
4000 | 0.000556 | 13.48921 | 30 |
800 | 0.000833 | 30.012 | 20 |
750 | 0.00167 | 7.984032 | 10 |
1500 | 0.0033 | 10.10101 | 50 |
300 | 0.0167 | 15.16966 | 76 |
40 | 0.033 | 36.36364 | 48 |
50 | 0.1 | 16.8 | 84 |
20 | 1 | 1.6 | 32 |
120 | 10 | 0.1 | 120 |
4 | 20 | 0.4 | 32 |
1 | 33.3 | 0.840841 | 28 |
0.2 | 50 | 0.4 | 4 |
0.05 | 100 | 7 | 35 |
0.04 | 1000 | 1.95 | 78 |
Charge carrier (C) | Frequency term (Hz) | Power (W) |
|---|---|---|
5000 | 0.000278 | 80 |
2500 | 0.000556 | 42 |
1000 | 0.000833 | 94 |
900 | 0.00167 | 56 |
1700 | 0.0033 | 130 |
500 | 0.0167 | 37 |
45 | 0.033 | 21 |
58 | 0.1 | 220 |
68 | 1 | 31 |
184 | 10 | 71 |
5 | 20 | 150 |
2 | 33.3 | 75 |
0.4 | 50 | 60 |
0.06 | 100 | 140 |
0.08 | 1000 | 12 |
(m) | c (mM) | (V) | frequency (mHz) | I (A) |
|---|---|---|---|---|
50 | 1000 | 1.41 | 0.28 | 0.21 |
100 | 1000 | 2.83 | 0.28 | 0.21 |
150 | 1000 | 4.24 | 0.28 | 0.21 |
200 | 1000 | 5.66 | 0.28 | 0.21 |
250 | 1000 | 7.07 | 0.28 | 0.21 |
300 | 1000 | 8.48 | 0.28 | 0.21 |
350 | 1000 | 9.90 | 0.28 | 0.21 |
400 | 1000 | 11.30 | 0.28 | 0.21 |
450 | 1000 | 12.70 | 0.28 | 0.21 |
500 | 1000 | 14.10 | 0.28 | 0.21 |
RNN | Recurrent Neural Network |
LSTM | Long Short-Term Memory |
ReLU | Rectified Linear Unit |
ANN | Artificial Neural Network |
CNN | Convolutional Neural Network |
SVR | Support Vector Regression |
DFT | Density Functional Theory |
LIB | Lithium Ion Battery |
DANN | Distributed Artificial Neural Network |
PDE | Partial Differential Equation |
| [1] | Raissi, M., Paris, P., George, E. K., Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations, Journal of Computational Physics, 2019, 378, 686-707. |
| [2] | Norvig, P., Russes S. J., Artificial Intelligence: A Modern Approach, Prentice Hall, 2009. |
| [3] | Goodfellow, I., Bengio, Y., Courville, A., Deep Learning, MIT Press, 2016. |
| [4] |
Python. Available from:
https://www.python.org/ (accessed 8 June 2025). |
| [5] | Millner, G., Mucke, M., Romaner, L., Scheiber, D., Machine learning mechanical properties of steel sheets from an industrial production route, Materialia, 2023, 30, 101810. |
| [6] | Rowe, P., Csanyi, G., Alfe, D., Michaelides, A., Development of a machine learning potential for graphene, Phys. Rev. B, 2018, 97, 054303. |
| [7] | Haghi, S., Hidalgo, M. F. V., Niri, M. F., Daub, R., Marco, J., Machine Learning in Lithium-Ion Battery Cell Production: A Comprehensive Mapping Study, Batteries & Supercaps, 2023, 6, e202300046. |
| [8] | Gerold, E., Antrekowitsch, H. A Sustainable Approach for the Recovery of Manganese from Spent Lithium-Ion Batteries via Photocatalytic Oxidation. International Journal of Materials Science and Applications. 2022, 11, 66-75. |
| [9] | D. Roman, S. Saxena, V. Robu, M. Pecht, D. Flynn, Machine learning pipeline for battery state-of-health estimation, Nature Machine Intelligence, 2021, 3, 447-456. |
| [10] | A. Lanubile, P. Bosoni, G. Pozzato, A. Allam, M. Acquarone, S. Onori, Domain knowledge-guided machine learning framework for state of health estimation in Lithium-ion batteries, Communications Engineering, 2024, 3, 168. |
| [11] | N. Costa, D. Anseán, M. Dubarry, L. Sanchez, ICFormer: A Deep Learning model for informed lithium-ion battery diagnosis and early knee detection, Journal of Power Sources, Journal of Power Sources, 2024, 592, 233910. |
| [12] | K. A. Severson , P. M. Attia, et. al. Data-driven prediction of battery cycle life before capacity degradation, Nature Energy, 2019, 4, 383-391. |
| [13] | Ballard, Z., Brown, C., Madni, A. M., Ozcan, A., Machine learning and computation-enabled intelligent sensor design, Nature Machine Intelligence, 2021, 3, 556-565. |
| [14] | E. Ozer, J. Kufel, et. al. Malodour classification with low-cost flexible electronics, Nature Communications, 2023, 14, 777. |
| [15] | T. B. Martin, D. J. Audus, Emerging Trends in Machine Learning: A Polymer Perspective, ACS Polym. Au, 2023, 3, 239-258. |
| [16] | Forni, T., Baldoni, M., Piane, F. L., Mercuri, F., GrapheNet: a deep learning framework for predicting the physical and electronic properties of nanographenes using images, Scientific Reports, 2024, 14, 24576. |
| [17] | Dineva, A., Advances in Lithium-Ion Battery Management through Deep Learning Techniques: A Performance Analysis of State-of-Charge Prediction at Various Load Conditions, IEEE 17th International Symposium on Applied Computational Intelligence and Informatics, Romania, 2023, |
| [18] | Payette, J., Vaussenat, F., Cloutier, S., Deep learning framework for sensor array precision and accuracy enhancement, Scientific Reports, 2023, 13, 11237. |
APA Style
Nandigana, V. V. R. (2025). Physics Informed Methodology Using Neural Network to Match Measurements in Sensor Devices. Engineering and Applied Sciences, 10(4), 84-95. https://doi.org/10.11648/j.eas.20251004.12
ACS Style
Nandigana, V. V. R. Physics Informed Methodology Using Neural Network to Match Measurements in Sensor Devices. Eng. Appl. Sci. 2025, 10(4), 84-95. doi: 10.11648/j.eas.20251004.12
AMA Style
Nandigana VVR. Physics Informed Methodology Using Neural Network to Match Measurements in Sensor Devices. Eng Appl Sci. 2025;10(4):84-95. doi: 10.11648/j.eas.20251004.12
@article{10.11648/j.eas.20251004.12,
author = {Vishal Venkata Raghavendra Nandigana},
title = {Physics Informed Methodology Using Neural Network to Match Measurements in Sensor Devices
},
journal = {Engineering and Applied Sciences},
volume = {10},
number = {4},
pages = {84-95},
doi = {10.11648/j.eas.20251004.12},
url = {https://doi.org/10.11648/j.eas.20251004.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.eas.20251004.12},
abstract = {In this paper we develop physics informed neural network model to solve battery technology. The first model uses physics from the theory. The voltage of the battery is related to the charge carrier, frequency term and power. The theory is used to obtain 15 different voltages. The parameters charge carrier, frequency term, power and voltage are our 15 training data. The training data is trained using Recurrent Neural Network (RNN) Long Short-Term Memory (LSTM). The algorithm determines the weight based on the training data. We study for 50, 100, 150, 200 and 500 epoch. We predict for 15 test cases. The predict file has variables [charge carrier given, frequency given, voltage not given and power given]. We obtain huge error when the training set is given as one file with 15 rows of 4 variables in each row. However the physics from the theory matches with the predict answer for the voltage when the training file has one row of 4 variables that is repeated to study multiple times. We have 15 different training files. We study for 50, 100, 150, 200 and 500 epoch. The dependency on the epoch is visible until 200. The accuracy is 95% for few predict test case results. The predict voltage correlates with the theory. Thus, the model is physics from theory included in the neural network for the first time. Next, we study the physics informed partial differential equation with the neural network. We use 15 training sets. Each training set have 10 rows with variables [grid location, concentration, voltage distribution, frequency term and current]. We use our model to test for one case. The test variables are [same grid location, 1 new concentration, predict the voltage distribution, same frequency term and same current]. We obtain good output matching the actual and the physics. The accuracy is 80%. We study for epoch 50.},
year = {2025}
}
TY - JOUR T1 - Physics Informed Methodology Using Neural Network to Match Measurements in Sensor Devices AU - Vishal Venkata Raghavendra Nandigana Y1 - 2025/08/21 PY - 2025 N1 - https://doi.org/10.11648/j.eas.20251004.12 DO - 10.11648/j.eas.20251004.12 T2 - Engineering and Applied Sciences JF - Engineering and Applied Sciences JO - Engineering and Applied Sciences SP - 84 EP - 95 PB - Science Publishing Group SN - 2575-1468 UR - https://doi.org/10.11648/j.eas.20251004.12 AB - In this paper we develop physics informed neural network model to solve battery technology. The first model uses physics from the theory. The voltage of the battery is related to the charge carrier, frequency term and power. The theory is used to obtain 15 different voltages. The parameters charge carrier, frequency term, power and voltage are our 15 training data. The training data is trained using Recurrent Neural Network (RNN) Long Short-Term Memory (LSTM). The algorithm determines the weight based on the training data. We study for 50, 100, 150, 200 and 500 epoch. We predict for 15 test cases. The predict file has variables [charge carrier given, frequency given, voltage not given and power given]. We obtain huge error when the training set is given as one file with 15 rows of 4 variables in each row. However the physics from the theory matches with the predict answer for the voltage when the training file has one row of 4 variables that is repeated to study multiple times. We have 15 different training files. We study for 50, 100, 150, 200 and 500 epoch. The dependency on the epoch is visible until 200. The accuracy is 95% for few predict test case results. The predict voltage correlates with the theory. Thus, the model is physics from theory included in the neural network for the first time. Next, we study the physics informed partial differential equation with the neural network. We use 15 training sets. Each training set have 10 rows with variables [grid location, concentration, voltage distribution, frequency term and current]. We use our model to test for one case. The test variables are [same grid location, 1 new concentration, predict the voltage distribution, same frequency term and same current]. We obtain good output matching the actual and the physics. The accuracy is 80%. We study for epoch 50. VL - 10 IS - 4 ER -
206 Fluid Systems Laboratory, Department of Mechanical Engineering, Indian Institute of Technology Madras, Chennai, India
Biography: Vishal Venkata Raghavendra Nandigana is Associate Professor in Department of Mechanical Engineering in Indian Institute of Technology Madras, Chennai, India
Research Fields: micro-nanofluidic integrated systems, artificial intelligence, polymers, membranes

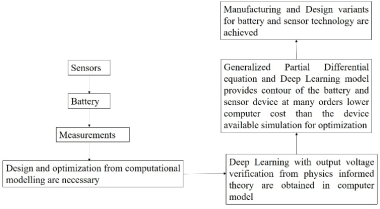
Figure 1. Schematic of the need for physics informed neural network deep learning algorithm in battery technology based sensor devices.
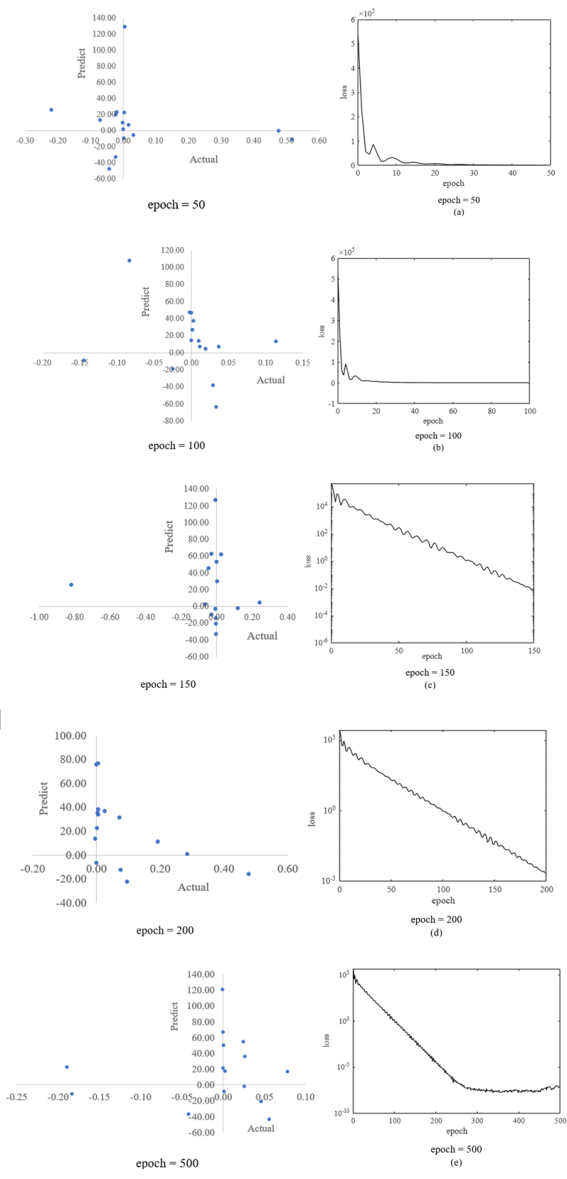
Figure 2. Approach 1 physics informed theory and neural network results for (a) epoch 50, result, loss (b) epoch 100, result, loss (c) epoch 150, result, loss (d) epoch 200, result, loss and (e) epoch 500, result, loss.
Figure 3. Approach 1 shows the plot in mayavi. The plot is mlab. points3d for 4 variables, charge, frequency, voltage and power. Epoch = 50. The plot shows the color and size of the points to be understood further.
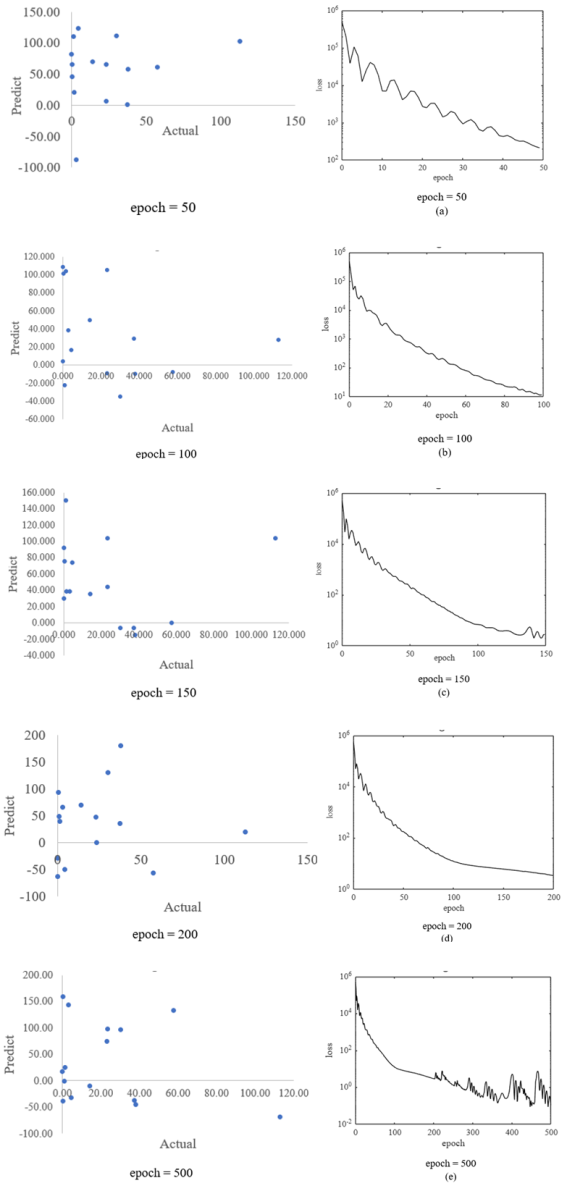
Figure 4. Approach 2 physics informed theory and neural network results for (a) epoch 50, result, loss (b) epoch 100, result, loss (c) epoch 150, result, loss (d) epoch 200, result, loss and (e) epoch 500, result, loss.
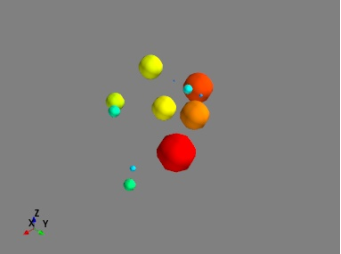
Figure 5. Approach 2 shows the plot in mayavi. The plot is mlab. points3d for 4 variables, charge, frequency, voltage and power. Epoch = 50. The plot shows the color and size of the points to be understood further.
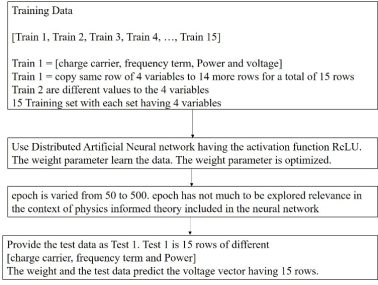
Figure 6. Training of data obtained from physics informed theory approach 2 and neural network algorithm.
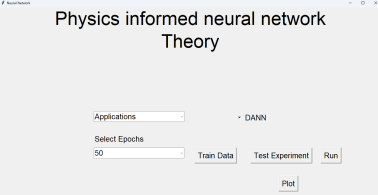
Figure 7. GUI for the Physics informed from theory and neural network.
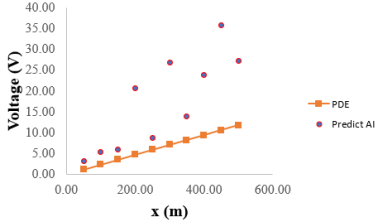
Figure 8. Comparison of physics informed from partial differential equation neural network and the only partial differential equation. In both models we obtain the 1D voltage distribution along the length. Here we use epoch = 50.
Information

