Continuous monitoring of body temperature is a major issue in the health care system due to the fact that sudden and extreme changes in body temperature are related to severe alterations in patient’s health. An innovative device with improved capabilities superior to the currently available infrared temperature sensors used for medical applications was invented. The device consists of a complex sensor module (CSM) and device body. The CSM works with 3 levels of mechanical freedom, which grants optimal dynamic repositioning in relation to the field of view, resulting in automatic continuous remote temperature measurement. The CSM incorporates a distance measurement sensor, main infrared sensor and secondary infrared sensor. The CSM is connected to control and processing unit. The processing unit and the control unit have a bidirectional connection for data transmission. A comparative analysis of the temperature values acquired by the autonomous contactless electromechanical device (thermo-i, Innovariver Ltd.) and Drager Infinity Delta patient monitor were performed. As a result, to the implementation of “IR noise elimination technology” the autonomous electromechanical device is capable to measure the patients’ core body temperature from a distance of 50 cm was invented. Although the distance between the patient and the device is increased more than 15 times, the accuracy of the measurements is preserved at the level which is being done from 3 cm distance without applying the invented technology. The device has a specific software and a sensor module, which operates autonomously and distantly from the patient, and positions itself automatically according to the patient’s body position. In contrast to the conventional infrared thermometers, our solution is self-operating, which reduces the human error risk, improves the workflow, and operates non-invasively at a convenient distance at the bedside of the patient.
| Published in | International Journal of Biomedical Science and Engineering (Volume 13, Issue 1) |
| DOI | 10.11648/j.ijbse.20251301.13 |
| Page(s) | 24-30 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
Infrared Sensors, Contactless Measurement, Core Body Temperature, Autonomous
PFAPA | Periodic Fever with Aphthous Stomatitis, Pharyngitis, and Adenitis |
FoV | Field of View |
S1 | Surface, Which Determines the Operation Range of the Device |
S2 | Surface of the Non-Covered Part of the Patient’s Body in the Operational Range |
dobj | Distance Between the Infrared Temperature Sensor and the Object (Patient) |
Tobj_max_correct | Maximum Value of the Corrected Contactless Measured Temperature |
Tobj | Measured Temperature of the Object (Patient) |
Tobj_amb | Ambient Temperature Around the Object (Patient) |
Tsens_amb | Ambient Temperature of Temperature Sensor |
Tmax | Detected Highest Temperature Value Within the Human Body Temperature Range |
AXY | Actuation of the Sensor Module at X and Y Axes |
Csensor | Control Action on Sensor Module |
Cactuator | Control Action on Actuators |
| [1] | Walter, E. J., Hanna-Jumma, S., Carraretto, M. & Forni, L. The pathophysiological basis and consequences of fever. Crit Care 20, (2016). |
| [2] | Kiekkas, P. et al. Fever effects and treatment in critical care: Literature review. Australian Critical Care 26, 130–135 (2013). |
| [3] | Zhao, Y. & Bergmann, J. H. M. Non-Contact Infrared Thermometers and Thermal Scanners for Human Body Temperature Monitoring: A Systematic Review. Sensors vol. 23 (2023). |
| [4] | Chan, P. Y., McNeil, J., Nguyen, T., Ryan, N. & Hopper, I. Novel wearable and contactless monitoring devices to identify deteriorating patients in the clinical setting: A systematic review protocol. Systematic Reviews vol. 9 (2020). |
| [5] | Baig, M. M., GholamHosseini, H., Moqeem, A. A., Mirza, F. & Lindén, M. A Systematic Review of Wearable Patient Monitoring Systems – Current Challenges and Opportunities for Clinical Adoption. J Med Syst 41, 115 (2017). |
| [6] | Deng, Z., Guo, L., Chen, X. & Wu, W. Smart Wearable Systems for Health Monitoring. Sensors vol. 23 (2023). |
| [7] |
Martin David. Automating Temperature Monitoring: Saving Time and Reducing Human Error | Tech Web Space (2023).
https://www.techwebspace.com/automating-temperature-monitoring-saving-time-and-reducing-human-error/ |
| [8] | Maleki Varnosfaderani, S. & Forouzanfar, M. The Role of AI in Hospitals and Clinics: Transforming Healthcare in the 21st Century. Bioengineering vol. 11 (2024). |
| [9] | Vanoni, F., Theodoropoulou, K. & Hofer, M. PFAPA syndrome: A review on treatment and outcome. Pediatric Rheumatology vol. 14 (2016). |
| [10] | Vanoni, F. et al. Towards a new set of classification criteria for PFAPA syndrome. Pediatric Rheumatology 16, (2018). |
| [11] | Zayas-Cabán, T., Okubo, T. H. & Posnack, S. Priorities to accelerate workflow automation in health care. Journal of the American Medical Informatics Association vol. 30 195–201 (2023). |
| [12] | Yang, B. et al. Non-invasive (non-contact) measurements of human thermal physiology signals and thermal comfort/discomfort poses -A review. Energy Build 224, 110261 (2020). |
| [13] | Bijster, R., Sadeghian, H. & van Keulen, F. Non-contact distance measurement and profilometry using thermal near-field radiation towards a high-resolution inspection and metrology solution. (M. I. Sanchez and V. A. Ukraintsev, Eds., Apr. 2016, p. 97780H) (2016). |
| [14] | Vincent, J. D., Hodges, S. E., Vampola, J., Stegall, M. & Pierce, G. Fundamentals of Infrared and Visible Detector Operation and Testing. (Wiley, 2015). |
| [15] | Razmara, P., Khezresmaeilzadeh, T. & Jenkins, B. K. Fever Detection with Infrared Thermography: Enhancing Accuracy through Machine Learning Techniques (2024). |
| [16] | Iskrenov Tanyo & Ahmedov Mustafa. BG2169U1 - Contactless device for temperature measurement. (2015). |
| [17] | Uddin, R. & Koo, I. Real-Time Remote Patient Monitoring: A Review of Biosensors Integrated with Multi-Hop IoT Systems via Cloud Connectivity. Applied Sciences (Switzerland) vol. 14 (2024). |
| [18] | Li, Z., Guo, Z., Han, H., Su, Z. & Sun, H. Design and characteristic analysis of multi-degree-of-freedom ultrasonic motor based on spherical stator. Review of Scientific Instruments 93, 025004 (2022). |
| [19] | Yong Ye, Yuting Liu, Weihan Yin, Jiahao Deng & Xiaofeng Zhu. Improving the measurement accuracy of distance and positioning for capacitive proximity detection in human-robot interaction. Microsystem Technologies vol. 27 12: 4305-4317 (2021). |
| [20] | Usamentiaga, R. et al. Infrared thermography for temperature measurement and non-destructive testing. Sensors (Switzerland) vol. 14 12305–12348 (2014). |
| [21] | Mazdeyasna, S., Ghassemi, P. & Wang, Q. Best Practices for Body Temperature Measurement with Infrared Thermography: External Factors Affecting Accuracy. Sensors 23, (2023). |
| [22] | Cui, S. & Xing, J. Research on Calibration Method of Infrared Temperature Measurement System Near Room Temperature Field. Front Phys 9, (2022). |
| [23] | Tomita, K. & Chew, M. Y. L. A Review of Infrared Thermography for Delamination Detection on Infrastructures and Buildings. Sensors 22, (2022). |
| [24] | Korotcenkov Ghenadii. Handbook of II-VI Semiconductor-Based Sensors and Radiation Detectors. (Springer International Publishing, Cham, 2023). |
| [25] |
Francis. Uncovered: Are Infrared Thermometers Reliable? | In-Depth Guide - Infrared for Health. (Sep. 15, 2024).
https://infraredforhealth.com/uncovered-are-infrared-thermometers-reliable-in-depth-guide/ |
| [26] | Varney, S. M., Manthey, D. E., Culpepper, V. E. & Creedon, J. F. A comparison of oral, tympanic, and rectal temperature measurement in the elderly. J Emerg Med 22, 153–157 (2002). |
APA Style
Ahmedov, M., Iskrenov, T., Minev, I. (2025). Autonomous Electromechanical Device for Contactless Measurement of Core Body Temperature. International Journal of Biomedical Science and Engineering, 13(1), 24-30. https://doi.org/10.11648/j.ijbse.20251301.13
ACS Style
Ahmedov, M.; Iskrenov, T.; Minev, I. Autonomous Electromechanical Device for Contactless Measurement of Core Body Temperature. Int. J. Biomed. Sci. Eng. 2025, 13(1), 24-30. doi: 10.11648/j.ijbse.20251301.13
AMA Style
Ahmedov M, Iskrenov T, Minev I. Autonomous Electromechanical Device for Contactless Measurement of Core Body Temperature. Int J Biomed Sci Eng. 2025;13(1):24-30. doi: 10.11648/j.ijbse.20251301.13
@article{10.11648/j.ijbse.20251301.13,
author = {Mustafa Ahmedov and Tanyo Iskrenov and Ivaylo Minev},
title = {Autonomous Electromechanical Device for Contactless Measurement of Core Body Temperature},
journal = {International Journal of Biomedical Science and Engineering},
volume = {13},
number = {1},
pages = {24-30},
doi = {10.11648/j.ijbse.20251301.13},
url = {https://doi.org/10.11648/j.ijbse.20251301.13},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ijbse.20251301.13},
abstract = {Continuous monitoring of body temperature is a major issue in the health care system due to the fact that sudden and extreme changes in body temperature are related to severe alterations in patient’s health. An innovative device with improved capabilities superior to the currently available infrared temperature sensors used for medical applications was invented. The device consists of a complex sensor module (CSM) and device body. The CSM works with 3 levels of mechanical freedom, which grants optimal dynamic repositioning in relation to the field of view, resulting in automatic continuous remote temperature measurement. The CSM incorporates a distance measurement sensor, main infrared sensor and secondary infrared sensor. The CSM is connected to control and processing unit. The processing unit and the control unit have a bidirectional connection for data transmission. A comparative analysis of the temperature values acquired by the autonomous contactless electromechanical device (thermo-i, Innovariver Ltd.) and Drager Infinity Delta patient monitor were performed. As a result, to the implementation of “IR noise elimination technology” the autonomous electromechanical device is capable to measure the patients’ core body temperature from a distance of 50 cm was invented. Although the distance between the patient and the device is increased more than 15 times, the accuracy of the measurements is preserved at the level which is being done from 3 cm distance without applying the invented technology. The device has a specific software and a sensor module, which operates autonomously and distantly from the patient, and positions itself automatically according to the patient’s body position. In contrast to the conventional infrared thermometers, our solution is self-operating, which reduces the human error risk, improves the workflow, and operates non-invasively at a convenient distance at the bedside of the patient.},
year = {2025}
}
TY - JOUR T1 - Autonomous Electromechanical Device for Contactless Measurement of Core Body Temperature AU - Mustafa Ahmedov AU - Tanyo Iskrenov AU - Ivaylo Minev Y1 - 2025/03/26 PY - 2025 N1 - https://doi.org/10.11648/j.ijbse.20251301.13 DO - 10.11648/j.ijbse.20251301.13 T2 - International Journal of Biomedical Science and Engineering JF - International Journal of Biomedical Science and Engineering JO - International Journal of Biomedical Science and Engineering SP - 24 EP - 30 PB - Science Publishing Group SN - 2376-7235 UR - https://doi.org/10.11648/j.ijbse.20251301.13 AB - Continuous monitoring of body temperature is a major issue in the health care system due to the fact that sudden and extreme changes in body temperature are related to severe alterations in patient’s health. An innovative device with improved capabilities superior to the currently available infrared temperature sensors used for medical applications was invented. The device consists of a complex sensor module (CSM) and device body. The CSM works with 3 levels of mechanical freedom, which grants optimal dynamic repositioning in relation to the field of view, resulting in automatic continuous remote temperature measurement. The CSM incorporates a distance measurement sensor, main infrared sensor and secondary infrared sensor. The CSM is connected to control and processing unit. The processing unit and the control unit have a bidirectional connection for data transmission. A comparative analysis of the temperature values acquired by the autonomous contactless electromechanical device (thermo-i, Innovariver Ltd.) and Drager Infinity Delta patient monitor were performed. As a result, to the implementation of “IR noise elimination technology” the autonomous electromechanical device is capable to measure the patients’ core body temperature from a distance of 50 cm was invented. Although the distance between the patient and the device is increased more than 15 times, the accuracy of the measurements is preserved at the level which is being done from 3 cm distance without applying the invented technology. The device has a specific software and a sensor module, which operates autonomously and distantly from the patient, and positions itself automatically according to the patient’s body position. In contrast to the conventional infrared thermometers, our solution is self-operating, which reduces the human error risk, improves the workflow, and operates non-invasively at a convenient distance at the bedside of the patient. VL - 13 IS - 1 ER -
Research and Development Department, Innovariver Ltd, Sofia, Bulgaria
Research and Development Department, Innovariver Ltd, Sofia, Bulgaria
Department Anaesthesiology, Emergency and Intensive Care Medicine, Medical University of Plovdiv, Plovdiv, Bulgaria
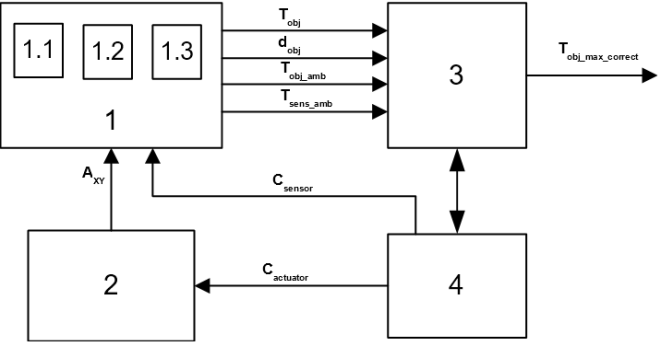
Figure 1. Block diagram of the complex sensor module.
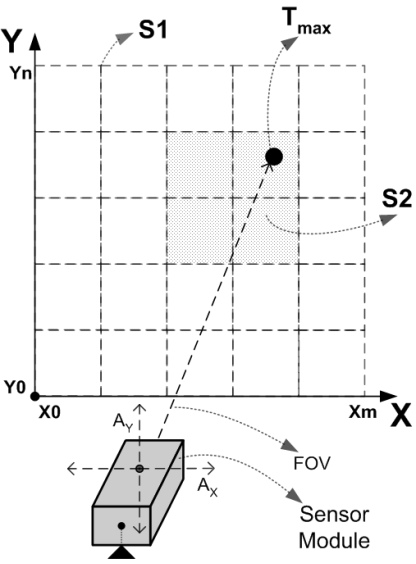
Figure 2. Illustrating of the complex sensor module within a preset operation range.
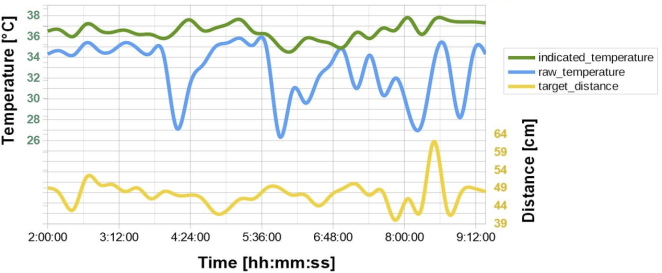
Figure 3. Body temperature curve, created by autonomous contactless electromechanical device.
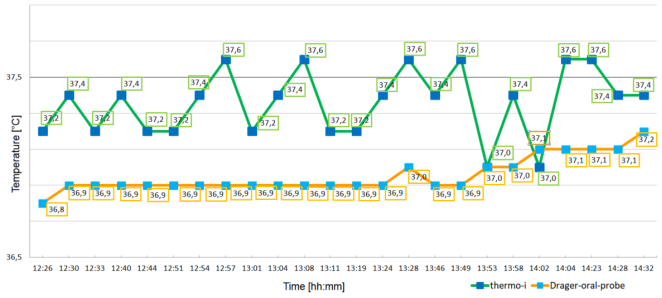
Figure 4. Comparison between temperature values acquired by thermo-i and Drager oral probe.
Information

