Abstract
With the increasing need to safeguard distant maritime interests and national security, aerial refueling has emerged as a critical method for extending the endurance of aircraft during long missions. Autonomous aerial refueling, which eliminates the need for human intervention, is particularly advantageous but also faces significant challenges. These challenges include wake turbulence and airflow disturbances, which can negatively impact the docking precision and success rates. To address these issues, this paper proposes an optical signal-based automatic locking detection device specifically designed for unmanned autonomous aerial refueling. This device ensures accurate and reliable detection of the docking status. Furthermore, to mitigate the disturbances caused by wake turbulence on the parachute cone, a novel vector air rudder-based control scheme is introduced. This scheme enables precise three-dimensional displacement control of the parachute cone, significantly enhancing docking accuracy. Extensive simulation results verify the effectiveness of the proposed device and control method, demonstrating marked improvements in docking precision, docking success rates, and overall flight safety. This research provides valuable insights for advancing autonomous aerial refueling technology and ensuring its reliable application in practical scenarios.
Keywords
AAR (Autonomous Aerial Refueling), Locking Detection, Docking Control, Fiber Optic Signal, Vector Air-rudder
1. Introduction
With the increasing complexity and diversity of modern military operations, the need for extended endurance and operational range of fighter aircraft during distant maritime patrols and combat missions has grown significantly. Aerial refueling, as a key technology to extend aircraft endurance, has been widely utilized. However, current aerial refueling practices primarily rely on pilot visual judgment and manual control. In the context of underdeveloped autonomous aerial refueling technology, the success rate is limited by wake turbulence and airflow disturbances. In particular, during the docking process, the parachute cone experiences irregular motion due to wake turbulence from the tanker and the head wave effects of the receiver aircraft, posing significant challenges to successful docking.
Extensive research has been conducted on autonomous aerial refueling, with the United States making significant advancements in this field. For instance, Dibley et al.
| [1] | Dibley R, Allen M, Nabaa N. Autonomous airborne refueling demonstration phase I flight-test results [C]//AIAA atmospheric flight mechanics conference and exhibit. 2007: 6639. https://doi.org/10.2514/6.2007-6639 |
[1]
demonstrated the feasibility of autonomous aerial refueling using the F/A-18 and Boeing 707-300, but the docking success rate remained affected by airflow disturbances. Owens
| [2] | Owens. Autonomous Aerial Refueling Demonstration Integrating The UCAS-D X-47B With A Manned Tanker In Limited Scoped Aerial Refueling Testing Vision-Based Sensor and Navigation System for Autonomous Air Refueling Modeling and Simulation of Hose-Paradrogue Aerial Refueling Systems. |
[2]
described the X-47B project, which used vision-based sensors for docking assessment; however, this method exhibited a risk of misjudgment under complex environmental conditions.
In China, research has mainly focused on flow field modeling and control system design. Wang Haitao et al.
| [3] | 王海涛, 董新民, 窦和锋, 等. 软管锥套式空中加油系统建模与特性分析 [J]. 北京航空航天大学学报, 2014, 40(1): 92-98. Wang Haitao, Dong Xinmin, Dou Hefeng, etc Modeling and Characteristics Analysis of Flexible Cone Sleeve Air Refueling System [J]. Journal of Beihang University, 2014, 40(1): 92-98. https://doi.org/10.13700/j.bh.1001-5965.2014.01.011 |
[3]
proposed a theoretical model for the head wave effect of the receiver aircraft and designed an automatic flight control system, but did not address the issue of docking state detection. Duan Haibin et al.
| [4] | 段海滨, 张奇夫, 范彦铭, 等. 基于计算机视觉的UAV自主空中加油半物理仿真 [J]. 北京航空航天大学学报, 2013, 39(11): 1491-1496. Duan Haibin, Zhang Qifu, Fan Yanming, etc Semi physical simulation of UAV autonomous aerial refueling based on computer vision [J] Journal of Beihang University, 2013, 39(11): 1491-1496 https://doi.org/10.13700/j.bh.1001-5965.2013.11.007 |
[4]
conducted in-depth studies on visual navigation and anti-disturbance control, including flight verification, but did not provide specific criteria for docking assessment. Xie Hongwen et al.
| [5] | 解洪文, 王宏伦. 基于双目视觉的自动空中加油近距导方法 [J]. 北京航空航天大学学报, 2011, 37(2): 206-209. Xie Hongwen, Wang Honglun Automatic aerial refueling close range guidance method based on binocular vision [J] Journal of Beihang University, 2011, 37(2): 206-209. https://doi.org/CNKI:SUN:BJHK.0.2011-02-019 |
[5]
utilized deep learning techniques to develop a predictive model for the parachute cone, but its application in actual docking processes was limited.
Other studies have explored different aspects of autonomous refueling: Guo Jun et al.
| [6] | 郭军, 董新民, 王龙等. 自主空中加油多摄像机近距相对导航与控制 [J]. 信息与控制, 2012, 41(1), 95-101. Guo Jun, Dong Xinmin, Wang Long, et al. Autonomous aerial refueling multi camera close range relative navigation and control [J] Information and Control, 2012, 41(1), 95-101. https://doi.org/10.3724/SP.J.1219.2012.00095 |
[6]
developed a visual navigation system model and trajectory tracking control laws, mainly for simulation purposes. Song Mengshi et al.
| [7] | 宋梦实 位置约束下软式自主空中加油的抗干扰控制 [J]. 航空学报, 2023, 44(20): 629114. Song Mengshi, Anti interference control of soft autonomous aerial refueling under position constraint [J]. Acta Aeronautica Sinica, 2023, 44(20): 629114. https://doi.org/10.7527/S1000-6893.2023.29114 |
[7]
proposed an anti-disturbance control method aimed at improving docking stability under complex conditions. Cai Yunpeng et al.
| [8] | 蔡云鹏, 任斌, 王大勇, 等. 无人机自主空中加油会合编队控制方法 [J]. Electronics Optics & Control, 2023, 30(11): 1-11. Cai Yunpeng, Ren Bin, Wang Dayong, etc Autonomous aerial refueling rendezvous formation control method for unmanned aerial vehicles [J] Electronics Optics & Control, 2023, 30(11): 1-11. https://doi.org/10.3969/j.issn.1671-637X.2023.11.004 |
[8]
investigated formation control methods, laying the groundwork for autonomous refueling. Zhang Dong et al.
| [9] | 张冬, 王世鹏, 施明健, 等. 一种空中自主加油扰动建模与自适应控制方法 [J]. 宇航学报, 2024, 45(3): 433-438. Zhang Dong, Wang Shipeng, Shi Mingjian, etc A disturbance modeling and adaptive control method for aerial autonomous refueling [J] Journal of Astronautics, 2024, 45(3): 433-438 https://doi.org/10.3873/j.issn.1000-1328.2024.03.010 |
[9]
established a disturbance modeling and adaptive control method to accurately track the parachute cone under airflow disturbances. Zhang Xinyu et al.
| [10] | 张新昱, 谢思宇, 陶洋, 李滚. 面向无人机空中加油紧密编队的鲁棒控制方法 [J]. 航空学报, 2023, 44(20): 62845. Zhang Xinyu, Xie Siyu, Tao Yang, Li Gun Robust control method for close formation of unmanned aerial vehicle aerial refueling [J] Journal of Aeronautics, 2023, 44(20): 62845 https://doi.org/10.7527/S1000-6893.2023.28425 |
[10]
introduced a robust formation control approach, which was mainly applied to close formation control of UAVs, with limited direct application to aerial refueling. Yuan Li
| [11] | 袁莉, 吴欣龙, 祁圣君. 自主空中加受油会合阶段控制策略研究 [J]. 飞行力学, 2021(004): 039. Yuan Li, Wu Xinlong, Qi Shengjun. Research on Control Strategy for Autonomous Air Refueling and Receiving Convergence Stage [J]. Flight Mechanics, 2021 (004): 039 https://doi.org/10.13645/j.cnki.f.d.20210615.001 |
[11]
studied control strategies for UAV aerial refueling and verified the feasibility through flight tests. Liu Zhao et al.
| [12] | 刘曌, 袁锁中, 周春华. 软管式自主空中加油受油机控制系统研究 [J]. 科学技术与工程, 2011, 11(8): 7. Liu Zhao, Yuan Suozhong, Zhou Chunhua. Research on the Control System of Flexible Tube Autonomous Aerial Refueling Receiving Aircraft [J]. Science, Technology and Engineering, 2011, 11(8): 7. https://doi.org/10.3969/j.issn.1671-1815.2011.08.023 |
[12]
designed a flight control system utilizing a reference trajectory generation module to achieve smooth flight of the receiver aircraft, but did not address the docking detection issue.
In summary, existing research has primarily focused on modeling and control algorithm design, with insufficient attention given to active anti-disturbance control of the parachute cone and precise docking detection. This paper proposes an optical signal-based locking detection device and a vector air rudder-based control scheme for the parachute cone, aiming to address these gaps and improve docking success rate and system disturbance resistance.
2. Introduction to Airborne Fueling
Sufficient fuel is a prerequisite for aircraft to perform maneuvers and engage in air combat
| [13] | 孙聪. 从空战制胜机理演变看未来战斗机发展趋势 [J]. 航空学报, 2021, 42(8): 525826. SUN C. Development trend of future fighter: A review of evolution of winning mechanism in air combat [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525826 (in Chinese). https://doi.org/10.7527/S1000-6893.2021.25826 |
[13]
, enhancing both AI-based intelligent combat capabilities and the operational effectiveness of carrier-based aircraft
| [14] | 王永庆. 固定翼舰载战斗机关键技术与未来发展 [J]. 航空学报, 2021, 42(8): 525859. Wang Yongqing Key Technologies and Future Development of Fixed Wing Carrier based Fighter Aircraft [J]. Acta Aeronautica Sinica, 2021, 42(8): 525859 https://doi.org/10.7527/S1000-6893.2021.25859 |
[14]
. Aerial refueling is a technique in which a tanker supplies fuel to one or more receiver aircraft
| [15] | 孙智孝, 杨晟琦, 朴海音, 等. 未来智能空战发展综述 [J]. 航空学报, 2021, 42(8): 525799. SUN Z X, YANG S Q, PIAO H Y, et al. A survey of air combat artificial intelligence [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525799 (in Chinese). https://doi.org/10.7527/S1000-6893.2021.25799 |
| [16] | Yanming Fan, Flight Control [M]. Beijing: Air Industry Press, 2021, pp. 1321–1326. |
[15, 16]
, while autonomous aerial refueling generally refers to the process by which an unmanned receiver autonomously completes refueling operations.
Figure 1 illustrates an Omega tanker refueling an F-18 receiver, and
Figure 2 provides an example of a successful docking. Since the first aerial refueling in 1923, extensive exploration and advancements have been made in this field globally. In modern combat, aerial refueling significantly increases aircraft endurance and operational range, playing a vital role, particularly in distant maritime patrols and battlefield missions.
Figure 1. The Omega tanker and F-18 receiver.
Figure 2. X-47B connect successfully.
China has also conducted extensive research in aerial refueling; however, it primarily relies on manual control, with pilots visually assessing docking success.
Figure 3 illustrates the refueling operation of China’s YY-20 tanker with J-20 and J-16 aircraft.
Figure 3. YY-20 and J-20 and J-16 AR.
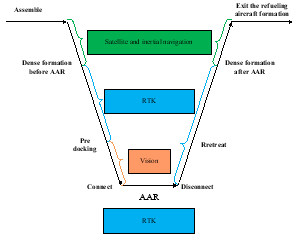
The usage of sensors for autonomous aerial refueling is shown in
Figure 4. Satellite and inertial navigation are used for long-range operations, while carrier phase differential is employed at close range. Visual guidance is used during docking, and carrier phase differential is used again after successful docking.
Currently, engineering practice lacks sensors capable of determining the docking status between the tanker and the receiver aircraft, making it necessary to rely on the pilot's visual judgment to assess docking success. However, visual judgment has a certain error rate, and sometimes docking is incorrectly judged as unsuccessful even when it has occurred. Therefore, there is an urgent need for a device that can accurately determine docking success.
Moreover, the wake turbulence generated by the tanker poses a significant flight risk for the receiver aircraft, and addressing this risk remains a challenging issue. To tackle this problem, this paper proposes a control method based on vector air rudder.
3. General Process of Self-receiving Oil
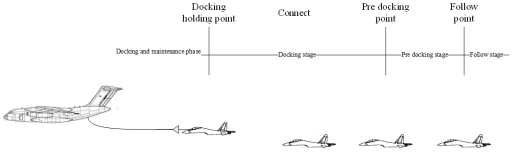
Autonomous aerial refueling primarily involves several stages: following, pre-docking, docking, docking hold, and disengagement, as shown in
Figure 5. The control precision at each stage significantly impacts the overall refueling success rate. During the pre-docking and docking stages, wake turbulence from the tanker and head-wave disturbances from the receiver aircraft present major challenges to the stability and control precision of the drogue. Traditional visual assessments are insufficient to meet the demands of autonomous aerial refueling, creating an urgent need for more automated and accurate docking detection and drogue control solutions to enhance system safety and reliability.
4. Automatic Detection of Butt Locking Based on Fibre Optic Signals
4.1. Introduction
Due to the risk of electrical sparks igniting aviation fuel during aerial refueling, electrical signals are not allowed to pass through the fuel pipelines. Currently, manned aerial refueling typically relies on visual judgment to determine docking success. However, for unmanned autonomous refueling, the flight control system requires a signal indicating whether docking has been successful for feedback control and tracking.
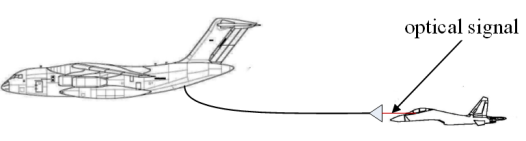
Figure 6 illustrates a typical state of aerial refueling between two aircraft.
To address this issue, this paper proposes an automatic locking detection device for unmanned autonomous aerial refueling based on optical signals, which automatically provides a signal indicating successful docking. This system utilizes optical fibers and photosensitive resistors to detect docking success.
4.2. Proposal
Modifications to the existing refueling probe are proposed as follows: as shown in
Figure 7, a ring of hard glass light-transmitting holes is added to the front end of the probe, giving it light-transmitting characteristics. Inside the glass light-transmitting holes, an optical fiber is added to transmit light signals to the receiver aircraft.
Modifications to the existing refueling cone are also suggested: currently, a small turbine powers the original LED lights on the cone, which illuminate the receiver aircraft. In addition, a ring of specific wavelength LEDs (to avoid sunlight interference), such as ultraviolet lights, will be added and directed outward along the centerline of the cone to enter the light-transmitting holes of the probe.
When the probe successfully docks and locks with the cone, the light from the added specific wavelength LEDs can pass through the glass light-transmitting holes into the optical fiber and be transmitted to the receiver aircraft.
At the end of the optical fiber, away from the fuel line, a photosensitive resistor sensitive to the specific wavelength is installed. When the specific wavelength LED light reaches the photosensitive resistor, its resistance decreases, generating a high-level signal that indicates successful docking. Once the successful docking signal is obtained, further detection will not be repeated until the distance between the tanker and the receiver aircraft exceeds a certain threshold that requires a reset.
This successful docking signal is sent to the control system computer of the receiver aircraft to maintain control after docking.
Figure 6. Diagram of docking process.
Figure 7. Successful docking detection plan.
5. Autonomous Oiled Control Method Based on Vector Air Rudder
5.1. Introduction
During aerial refueling, disturbances to the cone caused by the head wave of the receiver aircraft and the turbulence from the tanker can lead to irregular movements of the cone, significantly impacting the docking success rate. Considering that controlling the movement of the cone does not generate complex turbulence, this paper proposes an active control scheme for the cone based on vector air rudder technology.
The ducted vector air rudder can control the cone's movements up and down, left and right, while also generating control signals for the winch, allowing for forward and backward movement of the cone to locate the refueling probe of the receiver aircraft.
5.2. Proposal
To further enhance the success rate of autonomous docking, this paper proposes an active control device for the aerial refueling cone based on ducted vector air rudder technology. This active control scheme governs the three-dimensional movement of the cone, enabling rapid and precise docking with the receiver aircraft's probe.
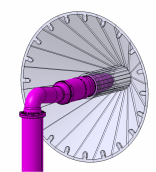
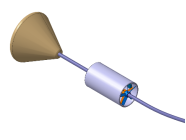
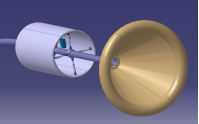
The proposed active control device, based on ducted vector air rudder technology, requires modifications to the existing cone (as shown in
Figures 8 and 9): a cylindrical ducted vector air rudder is added to the outer side of the refueling hose's end and the upper end of the refueling cone. The cylindrical wall is referred to as the duct body, and the inner wall of the body is connected to the refueling hose through a support structure consisting of multiple support rods, each of which is a telescopic rod. The air rudder contains an annular fan and an automatic cone controller; the annular fan drives a generator for power generation, while the cone controller drives the telescopic support rods to control the forward and backward, up and down, and side-to-side movements of the cone.
Figure 8. Overall schematic diagram.
Figure 9. Schematic diagram of electric actuator rod.
Initially, the receiver aircraft flies to the rear of the tanker, and the cone naturally extends to a certain position, remaining essentially stationary while waiting to execute the docking control. Once docking begins, the generator supplies power to the cone's automatic controller and the air rudder. The air rudder controls the direction of the incoming flow by actuating the electric actuators, thereby altering the aerodynamic force acting on the air rudder and managing the vertical and lateral displacements of the cone. To illustrate the control principle, consider the following examples:
When the receiver probe is detected to be positioned too high, the upper electric actuator rod extends while the lower electric actuator rod shortens, generating an upward control force that moves the cone upward.
When the receiver probe is detected to be positioned too far left, the left electric actuator rod extends while the right electric actuator rod shortens, creating a leftward control force that moves the cone to the left.
The control signals for the forward and backward distance of the cone generated by the automatic cone controller are transmitted wirelessly to the winch controller, which adjusts the cone's distance from the tanker. If the receiver cone has not yet reached the probe's position, the winch will extend until the cone is aligned with the probe. When the hose tension disappears, the hose is retracted; otherwise, it remains extended.
6. Autonomous Lubrication Control Law Design
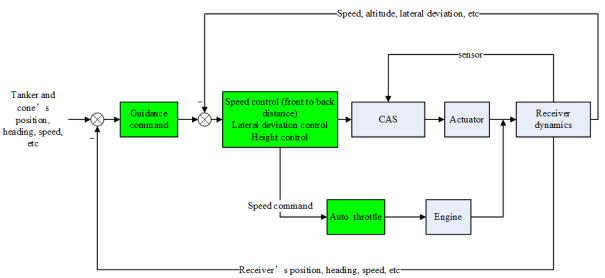
The control issues for autonomous aerial refueling primarily involve altitude control, lateral deviation control, and forward/backward displacement control, as shown in
Figure 10.
Building upon the previous discussion regarding docking success detection and control schemes, a control system for autonomous refueling can be designed. The control algorithms are not the focus of this paper and will not be elaborated upon.
Figure 10. Autonomous airborne refueling control logic.
7. Simulation Results
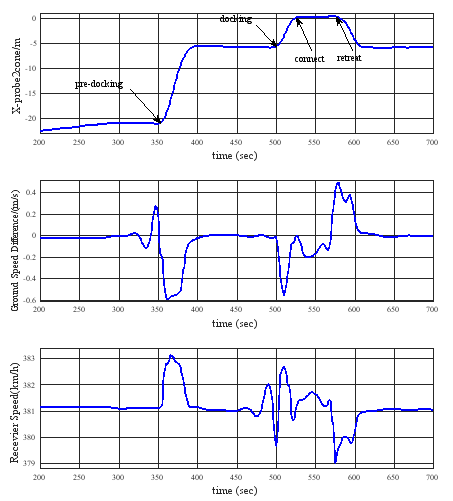
This paper conducts a simulation of autonomous aerial refueling for the F-16 aircraft following the simulation logic shown in
Figure 10, with the results presented in
Figure 11. The simulation results indicate that the receiver aircraft initially maintains a position 21 meters behind the tanker, in the follow stage. Upon receiving the pre-docking command, the receiver aircraft advances to a position 6 meters away from the tanker.
Once the docking command is received, the cone is controlled to extend in order to locate the probe. Successful docking occurs around 510 seconds, entering the post-docking hold control phase. Refueling is completed around 590 seconds, followed by disengagement.
Figure 11. Simulation results.
8. Conclusions
This paper conducts research on the docking detection and control methods for autonomous aerial refueling, with the main conclusions as follows:
This paper proposes an automatic locking detection device for unmanned autonomous aerial refueling based on optical signals, which can accurately provide a signal indicating successful docking, thus offering critical information for subsequent closed-loop flight control;
This paper presents an autonomous docking control scheme that utilizes vector air rudder technology to control the displacement of the cone, which exerts less influence on the receiver aircraft, thereby enabling docking with the refueling probe. This scheme can significantly reduce the impact of the tanker’s wake turbulence on the receiver aircraft, further enhancing the docking success rate and flight safety.
Abbreviations
AAR | Autonomous Aerial Refueling |
Author Contributions
Zhu Jiaxing: Conceptualization, Formal Analysis
Liu Yue: Writing – original draft
Liu Xu: Methodology
Zhang Shu: Writing – review & editing
Conflicts of Interest
The authors declare no conflicts of interest.
References
| [1] |
Dibley R, Allen M, Nabaa N. Autonomous airborne refueling demonstration phase I flight-test results [C]//AIAA atmospheric flight mechanics conference and exhibit. 2007: 6639.
https://doi.org/10.2514/6.2007-6639
|
| [2] |
Owens. Autonomous Aerial Refueling Demonstration Integrating The UCAS-D X-47B With A Manned Tanker In Limited Scoped Aerial Refueling Testing Vision-Based Sensor and Navigation System for Autonomous Air Refueling Modeling and Simulation of Hose-Paradrogue Aerial Refueling Systems.
|
| [3] |
王海涛, 董新民, 窦和锋, 等. 软管锥套式空中加油系统建模与特性分析 [J]. 北京航空航天大学学报, 2014, 40(1): 92-98. Wang Haitao, Dong Xinmin, Dou Hefeng, etc Modeling and Characteristics Analysis of Flexible Cone Sleeve Air Refueling System [J]. Journal of Beihang University, 2014, 40(1): 92-98.
https://doi.org/10.13700/j.bh.1001-5965.2014.01.011
|
| [4] |
段海滨, 张奇夫, 范彦铭, 等. 基于计算机视觉的UAV自主空中加油半物理仿真 [J]. 北京航空航天大学学报, 2013, 39(11): 1491-1496. Duan Haibin, Zhang Qifu, Fan Yanming, etc Semi physical simulation of UAV autonomous aerial refueling based on computer vision [J] Journal of Beihang University, 2013, 39(11): 1491-1496
https://doi.org/10.13700/j.bh.1001-5965.2013.11.007
|
| [5] |
解洪文, 王宏伦. 基于双目视觉的自动空中加油近距导方法 [J]. 北京航空航天大学学报, 2011, 37(2): 206-209. Xie Hongwen, Wang Honglun Automatic aerial refueling close range guidance method based on binocular vision [J] Journal of Beihang University, 2011, 37(2): 206-209.
https://doi.org/CNKI:SUN:BJHK.0.2011-02-019
|
| [6] |
郭军, 董新民, 王龙等. 自主空中加油多摄像机近距相对导航与控制 [J]. 信息与控制, 2012, 41(1), 95-101. Guo Jun, Dong Xinmin, Wang Long, et al. Autonomous aerial refueling multi camera close range relative navigation and control [J] Information and Control, 2012, 41(1), 95-101.
https://doi.org/10.3724/SP.J.1219.2012.00095
|
| [7] |
宋梦实 位置约束下软式自主空中加油的抗干扰控制 [J]. 航空学报, 2023, 44(20): 629114. Song Mengshi, Anti interference control of soft autonomous aerial refueling under position constraint [J]. Acta Aeronautica Sinica, 2023, 44(20): 629114.
https://doi.org/10.7527/S1000-6893.2023.29114
|
| [8] |
蔡云鹏, 任斌, 王大勇, 等. 无人机自主空中加油会合编队控制方法 [J]. Electronics Optics & Control, 2023, 30(11): 1-11. Cai Yunpeng, Ren Bin, Wang Dayong, etc Autonomous aerial refueling rendezvous formation control method for unmanned aerial vehicles [J] Electronics Optics & Control, 2023, 30(11): 1-11.
https://doi.org/10.3969/j.issn.1671-637X.2023.11.004
|
| [9] |
张冬, 王世鹏, 施明健, 等. 一种空中自主加油扰动建模与自适应控制方法 [J]. 宇航学报, 2024, 45(3): 433-438. Zhang Dong, Wang Shipeng, Shi Mingjian, etc A disturbance modeling and adaptive control method for aerial autonomous refueling [J] Journal of Astronautics, 2024, 45(3): 433-438
https://doi.org/10.3873/j.issn.1000-1328.2024.03.010
|
| [10] |
张新昱, 谢思宇, 陶洋, 李滚. 面向无人机空中加油紧密编队的鲁棒控制方法 [J]. 航空学报, 2023, 44(20): 62845. Zhang Xinyu, Xie Siyu, Tao Yang, Li Gun Robust control method for close formation of unmanned aerial vehicle aerial refueling [J] Journal of Aeronautics, 2023, 44(20): 62845
https://doi.org/10.7527/S1000-6893.2023.28425
|
| [11] |
袁莉, 吴欣龙, 祁圣君. 自主空中加受油会合阶段控制策略研究 [J]. 飞行力学, 2021(004): 039. Yuan Li, Wu Xinlong, Qi Shengjun. Research on Control Strategy for Autonomous Air Refueling and Receiving Convergence Stage [J]. Flight Mechanics, 2021 (004): 039
https://doi.org/10.13645/j.cnki.f.d.20210615.001
|
| [12] |
刘曌, 袁锁中, 周春华. 软管式自主空中加油受油机控制系统研究 [J]. 科学技术与工程, 2011, 11(8): 7. Liu Zhao, Yuan Suozhong, Zhou Chunhua. Research on the Control System of Flexible Tube Autonomous Aerial Refueling Receiving Aircraft [J]. Science, Technology and Engineering, 2011, 11(8): 7.
https://doi.org/10.3969/j.issn.1671-1815.2011.08.023
|
| [13] |
孙聪. 从空战制胜机理演变看未来战斗机发展趋势 [J]. 航空学报, 2021, 42(8): 525826. SUN C. Development trend of future fighter: A review of evolution of winning mechanism in air combat [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525826 (in Chinese).
https://doi.org/10.7527/S1000-6893.2021.25826
|
| [14] |
王永庆. 固定翼舰载战斗机关键技术与未来发展 [J]. 航空学报, 2021, 42(8): 525859. Wang Yongqing Key Technologies and Future Development of Fixed Wing Carrier based Fighter Aircraft [J]. Acta Aeronautica Sinica, 2021, 42(8): 525859
https://doi.org/10.7527/S1000-6893.2021.25859
|
| [15] |
孙智孝, 杨晟琦, 朴海音, 等. 未来智能空战发展综述 [J]. 航空学报, 2021, 42(8): 525799. SUN Z X, YANG S Q, PIAO H Y, et al. A survey of air combat artificial intelligence [J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525799 (in Chinese).
https://doi.org/10.7527/S1000-6893.2021.25799
|
| [16] |
Yanming Fan, Flight Control [M]. Beijing: Air Industry Press, 2021, pp. 1321–1326.
|
Cite This Article
-
APA Style
Jiaxing, Z., Yue, L., Xu, L., Shu, Z. (2025). A Locking Detection Device and Control Method Based on Vector Airrudder for Autonomous Aerial Refueling. American Journal of Computer Science and Technology, 8(1), 16-22. https://doi.org/10.11648/j.ajcst.20250801.12
 Copy
|
Copy
|
 Download
Download
ACS Style
Jiaxing, Z.; Yue, L.; Xu, L.; Shu, Z. A Locking Detection Device and Control Method Based on Vector Airrudder for Autonomous Aerial Refueling. Am. J. Comput. Sci. Technol. 2025, 8(1), 16-22. doi: 10.11648/j.ajcst.20250801.12
Copy
|
Download
AMA Style
Jiaxing Z, Yue L, Xu L, Shu Z. A Locking Detection Device and Control Method Based on Vector Airrudder for Autonomous Aerial Refueling. Am J Comput Sci Technol. 2025;8(1):16-22. doi: 10.11648/j.ajcst.20250801.12
Copy
|
Download
-
@article{10.11648/j.ajcst.20250801.12,
author = {Zhu Jiaxing and Liu Yue and Liu Xu and Zhang Shu},
title = {A Locking Detection Device and Control Method Based on Vector Airrudder for Autonomous Aerial Refueling
},
journal = {American Journal of Computer Science and Technology},
volume = {8},
number = {1},
pages = {16-22},
doi = {10.11648/j.ajcst.20250801.12},
url = {https://doi.org/10.11648/j.ajcst.20250801.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajcst.20250801.12},
abstract = {With the increasing need to safeguard distant maritime interests and national security, aerial refueling has emerged as a critical method for extending the endurance of aircraft during long missions. Autonomous aerial refueling, which eliminates the need for human intervention, is particularly advantageous but also faces significant challenges. These challenges include wake turbulence and airflow disturbances, which can negatively impact the docking precision and success rates. To address these issues, this paper proposes an optical signal-based automatic locking detection device specifically designed for unmanned autonomous aerial refueling. This device ensures accurate and reliable detection of the docking status. Furthermore, to mitigate the disturbances caused by wake turbulence on the parachute cone, a novel vector air rudder-based control scheme is introduced. This scheme enables precise three-dimensional displacement control of the parachute cone, significantly enhancing docking accuracy. Extensive simulation results verify the effectiveness of the proposed device and control method, demonstrating marked improvements in docking precision, docking success rates, and overall flight safety. This research provides valuable insights for advancing autonomous aerial refueling technology and ensuring its reliable application in practical scenarios.
},
year = {2025}
}
Copy
|
Download
-
TY - JOUR
T1 - A Locking Detection Device and Control Method Based on Vector Airrudder for Autonomous Aerial Refueling
AU - Zhu Jiaxing
AU - Liu Yue
AU - Liu Xu
AU - Zhang Shu
Y1 - 2025/01/24
PY - 2025
N1 - https://doi.org/10.11648/j.ajcst.20250801.12
DO - 10.11648/j.ajcst.20250801.12
T2 - American Journal of Computer Science and Technology
JF - American Journal of Computer Science and Technology
JO - American Journal of Computer Science and Technology
SP - 16
EP - 22
PB - Science Publishing Group
SN - 2640-012X
UR - https://doi.org/10.11648/j.ajcst.20250801.12
AB - With the increasing need to safeguard distant maritime interests and national security, aerial refueling has emerged as a critical method for extending the endurance of aircraft during long missions. Autonomous aerial refueling, which eliminates the need for human intervention, is particularly advantageous but also faces significant challenges. These challenges include wake turbulence and airflow disturbances, which can negatively impact the docking precision and success rates. To address these issues, this paper proposes an optical signal-based automatic locking detection device specifically designed for unmanned autonomous aerial refueling. This device ensures accurate and reliable detection of the docking status. Furthermore, to mitigate the disturbances caused by wake turbulence on the parachute cone, a novel vector air rudder-based control scheme is introduced. This scheme enables precise three-dimensional displacement control of the parachute cone, significantly enhancing docking accuracy. Extensive simulation results verify the effectiveness of the proposed device and control method, demonstrating marked improvements in docking precision, docking success rates, and overall flight safety. This research provides valuable insights for advancing autonomous aerial refueling technology and ensuring its reliable application in practical scenarios.
VL - 8
IS - 1
ER -
Copy
|
Download