Abstract
Many households are finding it difficult to prepare meals for the family because of the enormous tasks involved and encountered during cooking. Coupled with office work, business activities and other engagements by human beings have made it nearly possible for families to rely on junk meals which are not healthy sometimes too to human health and moreover cost intensive. This research article is geared towards designing an Internet of things kitchen assisted precision cooking robot that can cook different kinds of meals with a case study of Nigerian major ethnic cuisines. The kitchen robot is equipped with sensors, cameras, actuators and embedded with a micro-controller. The program control module was done using tensorFlow and blender 7.0 as the programming application packages with internet of things features to enable pervasive operations by the users. The methodology adopted in the design is the object oriented analysis and design methodology (OOADM) using the unified modeling languages (UML) of USE Case diagram. In this research, 25 datasets comprising the various recipes for cooking Nigerian cuisines were trained using Convolutional Neural Network (CNN) for image processing and classifications while the confusion matrix was used to evaluate the performance of the classification. The classified images from the recipes were placed on classified cupboards designated as cupboard 1, cupboard 2 and cupboard 3 respectively for easy identification by the robot. The results got from the training showed that the kitchen assisted precision robot was able to classify and detect recipes at an accuracy of 92%, making it a more reliable tool in precise cooking.
|
Published in
|
American Journal of Artificial Intelligence (Volume 9, Issue 1)
|
|
DOI
|
10.11648/j.ajai.20250901.18
|
|
Page(s)
|
80-90 |
|
Creative Commons
|

This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited.
|
|
Copyright
|
Copyright © The Author(s), 2025. Published by Science Publishing Group
|
Keywords
Internet of Things, Classified Cupboards, Robot, Recipe
1. Introduction
In recent years, the integration of robotics into everyday life has gained considerable momentum, particularly in domestic environments such as the kitchen. Kitchen-assisted robots are intelligent systems designed to support or automate various culinary tasks. Theses robots aim to enhance the efficiency, safety and convenience of cooking, especially for individuals with limited time, mobility challenges, or lack of culinary expertise.
Every household engage in cooking in order to prepare food for the entire family. Consequently, preparing these meals may be tedious depending on the engagement of the cook for that day. More so, many households may not meet up with the demands of the family members in terms of preparing the food on time and the time it takes to prepare possibly their favorite meals. These assumptions hampers meal preparations and many households today rely mostly on junk foods causing a lot of diseases such as kidney failures, liver problems etc.
The Internet of Things (IoT) which refers to the network of physical objects, devices, vehicle, appliances, and many more embedded with sensors, software and connectivity, enabling them to collect, exchange, and process data has been a very big tool as a growing technology to make human work easier. The internet of things has so many applications such as remote control of technological inventions to online monitoring of activities done by animate and inanimate beings,
| [10] | Odikwa. H. N, Francis, C. E., and Osaki, M. T. (2025). A Scalable Real-Time IoT Agricultural Farm Sensor-Based Application Monitoring System. GVU Journal of Science, Health and Technology. 10(1), 102-105. |
[10]
.
The intersection of robotics and the Internet of Things (IoT) is transforming numerous industries, including the culinary sector. Precision cooking, which emphasizes meticulous control over cooking parameters such as temperature, time, and ingredient proportions, can significantly benefit from automation and connectivity. This study focuses on the design and implementation of a simulated environment for robot-assisted precision cooking using IoT technologies.
| [3] | Jung, S., Kim, H., & Park, J. (2017). The role of IoT and robotics in precision cooking systems: A review. Automation in Culinary Science, 12(3), 55-72. |
[3]
Furthermore, precision cooking is a type of cooking which applies accurate measurement and timing during cooking. To achieve a consistent cooking. precision cooking is always applied by smart cooking systems where ingredients are added based on the set timing. Precision cooking has numerous advantages such as avoiding waste of time in cooking, addition of precise ingredients etc
| [4] | Jonathan Blutinger, Alissa Tsai, Erika Storvick, Gabriel, Elise and Noà Samarelli. (2023). Precision cooking for printed foods via multiwavelength lasers. Research Square. 1-14. |
[4]
.
Precision cooking, a culinary technique that has gained momentum in recent years, involves cooking food at precise, controlled temperatures over extended periods to achieve optimal results. This method is a departure from traditional cooking techniques that rely on high heat and time estimation, instead focusing on the importance of maintaining specific temperatures to achieve precise outcomes. Precision cooking can be achieved using various equipment such as sous vide immersion circulators, precision cookers, and precision ovens, all of which allow for consistent and accurate temperature control.
The primary benefit of precision cooking lies in its ability to ensure even cooking and prevent overcooking or under-cooking, resulting in perfectly cooked dishes with desirable textures and flavors. By maintaining a constant temperature throughout the cooking process, precision cooking helps to retain valuable nutrients, moisture, and tenderness in the food, resulting in a superior dining experience. This level of control and precision is particularly advantageous when preparing delicate proteins, such as fish and eggs, which can easily become overcooked with traditional cooking methods.
Furthermore, precision cooking enables chefs and home cooks to achieve consistent results every time they cook a particular dish, eliminating the need for guesswork and trial-and-error
| [9] | Nakajima, T., Sato, Y., & Fujiwara, K. (2013). Precision cooking using IoT sensors for accurate temperature control. Culinary Science Journal, 10(2), 112-129. |
[9]
.
precision cooking represents a modern approach to cooking that emphasizes precision, control, and consistency in the culinary process. By harnessing the power of precise temperature control, chefs and home cooks can unlock new possibilities in the kitchen and achieve exceptional results with ease
| [15] | Zhang, L., Chen, Y., & Wang, T. (2020). Integration of IoT sensors for monitoring and adjusting cooking parameters in real-time. IEEE Sensors Journal, 20(3), 2105-2116. |
[15]
.
2. Literature Review
The development of kitchen-assisted robots has evolved significantly over the past decade, drawing on advancements in artificial intelligence, robotics, and human-computer interaction. Initial efforts in robotic cooking were largely confined to control industrial environments. A notable milestone was by Moley Robotics Kitchen shown in
figure 1, which demonstrated a fully automated system capable of replicating professional chefs’.
Academic research has also explored how kitchen robots can learn and generalize cooking tasks.
| [1] | Beetz, M., Tenorth, M., Mosenlechner, L., and Klank, U. (2011). RoboEarth-a world wide web for Robots. IEEE Robotics and Automation Magazine, 18(2), 69-82. |
[1]
introduced RobothEarth, hosting services on how to prepare meals or use appliances having precision accuracy of up to 82 percent.
| [1] | Beetz, M., Tenorth, M., Mosenlechner, L., and Klank, U. (2011). RoboEarth-a world wide web for Robots. IEEE Robotics and Automation Magazine, 18(2), 69-82. |
[1]
also presented a system where robots could semantically interpret kitchen scenes, recognize utensils etc.
Consequently, human-robot interaction (HRI) is a central concern in kitchen robotics, as the environment is inherently collaborative.
| [12] | Srinivasa, S. S., Ferguson, D., Berenson, D., Collet, A., Diankoy, R., Helfrich, C. (2013). HERB Cutler for manipulation reset autonomous. |
[12]
explored socially aware robots capable of understanding human gestures, speech, and proximity to perform tasks safely and effectively.
A study highlighted issues such as the high cost of robotic systems, limited adaptability to different kitchen layouts, and the need for improved user interfaces
| [11] | Park, Y., Lee, D and Kim, S. (2020). Challenges and Future Directions in Domestic Service Robots. A Review. International Journal of Advanced Robotic Systems. 17(1), 1-15. |
[11]
.
Generally, literature in this field underscores a steady trend toward smarter, more adaptable kitchen robots. This paper presents a more accurate and precise kitchen assisted robot that can do so many things at the kitchen at the same time such as switching of gas, putting the pot on the gas, adding the desired quantity of water in the pot, precise cooking of local dishes using the classified cupboards as recipes (ingredients).
2.1. Internet of Things (IoT) in Precision Cooking
The integration of Internet of Things (IoT) technology in precision cooking systems has revolutionized the way we approach food preparation. With the advancement of IoT devices and sensors, coupled with the capabilities of artificial intelligence (AI) and robotics, simulated robot-assisted precision cooking has emerged as a promising solution for achieving consistent and high-quality culinary outcomes. Development of a smart kitchen system for automated cooking processes, in a study by
| [7] | Li, H., Zhao, T., & Wang, R. (2018). Development of an IoT-powered smart kitchen system for automated cooking. Journal of Smart Home Technologies, 15(2), 210-223. |
[7]
, a smart kitchen system was developed using IoT technology to automate cooking processes. The system utilized simulated robots to prepare and cook meals based on predefined recipes, with precise ingredient measurements and cooking times, in another research by
| [2] | Chen, Y., Lin, Y., & Wang, J. (2017). IoT-enabled smart kitchen system for automated meal preparation. IEEE Transactions on Industrial Informatics, 13(5), 2051-2062. |
[2]
, demonstrated that IoT technology can significantly improve cooking efficiency and accuracy in simulated robot-assisted systems. Automated ingredient dispensing and precise temperature control led to consistent and high-quality results.
One of the key aspects of IoT technology in precision cooking is its ability to regulate cooking parameters in real time. IoT devices such as temperature sensors, humidity sensors, and smart cooking appliances can collect and transmit data to a centralized system, enabling precise control over cooking conditions. This level of automation not only ensures accuracy in cooking processes but also enhances efficiency and eliminates the possibility of human error. Integration of IoT sensors for monitoring and adjusting cooking parameters in real-time, a study by
| [17] | Zheng, P., Lin, J., & Wei, H. (2019). Machine learning algorithms for predicting optimal cooking settings in automated kitchens. Artificial Intelligence in Smart Home Technologies, 24(1), 75-93. |
[17]
focused on the integration of IoT sensors for real-time monitoring and adjustment of cooking parameters. Simulated robots were used to perform tasks such as temperature control and stirring, with sensor data analyzed to optimize cooking processes and a study by
| [6] | Lee, S., Choi, B., & Lim, K. (2018). IoT-enabled robotic cooking system with real-time monitoring and automation. Sensors & Actuators: A. Physical, 278, 150-163. |
[6]
, researchers developed an IoT-enabled robotic cooking system that utilized simulated robots to assist in precision cooking tasks. The system incorporated various sensors and actuators to monitor and control cooking parameters, resulting in consistent and accurate cooking outcomes.
Designing a simulated robot-assisted precision cooking system involves careful consideration of various components. The selection and integration of IoT sensors play a crucial role in monitoring and adjusting cooking parameters to achieve desired outcomes. Additionally, the design of a robotic arm equipped with manipulators is essential for precise ingredient handling and food preparation. In a study by
| [5] | Kim, M., Zhang, L., & Chen, X. (2019). Integration of IoT-enabled robotic arms for precision cooking in smart kitchens. IEEE Internet of Things Journal, 7(6), 5012-5025. |
[5]
, robotic arms were used for precise ingredient dispensing in cooking tasks. IoT sensors were integrated to monitor ingredient levels and adjust dispensing rates, ensuring accurate measurements and consistent results.
AI algorithms are implemented for recipe recommendation, cooking control, and adaptive learning to optimize cooking procedures based on user preferences and feedback. A user-friendly interface is also necessary for seamless interaction with the system, enabling users to monitor and control the cooking process effortlessly.
Simulation techniques are indispensable in the design and testing of simulated robot-assisted precision cooking systems. Simulation tools and technologies allow for the modeling of complex cooking processes, enabling researchers to evaluate different scenarios, optimize cooking parameters, and enhance system efficiency. By utilizing simulation, researchers can minimize trial-and-error experimentation, reduce costs, and accelerate the development of innovative cooking solutions.
Several case studies and research advancements have demonstrated the efficacy of simulated robot-assisted precision cooking systems with IoT integration. Machine learning algorithms have been successfully implemented to analyze IoT data in real time, enabling predictive maintenance, fault detection, and optimization of cooking procedures. By utilizing IoT data for real-time monitoring and control, researchers have been able to achieve precise cooking results and improve overall system performance. The optimization of robotic arm behavior for food preparation further enhances the efficiency and effectiveness of the system. A study by
| [16] | Zhang, X., Wang, R., & Li, J. (2019). Evaluating the efficiency and accuracy of IoT-enabled precision cooking systems. IEEE Transactions on Consumer Electronics, 65(4), 4071-4080. |
[16]
evaluated the efficiency and accuracy of IoT-enabled precision cooking systems that incorporated simulated robots. The research findings revealed that these systems were able to achieve precise cooking results with reduced cooking times and improved consistency.
Despite the potential benefits of simulated robot-assisted precision cooking using IoT, there are several challenges that need to be addressed. These include data security and privacy concerns, interoperability issues, and the complexity of integrating multiple IoT devices and sensors. Moreover, the continuous advancement of AI, IoT, and simulation technologies presents exciting opportunities for enhancing system intelligence and user experience in simulated robot-assisted precision cooking systems.
2.2. Simulation Techniques for Precision Cooking
Simulation techniques play a crucial role in the design, optimization, and testing of precision cooking systems. These systems aim to achieve precise and consistent cooking results by controlling various parameters such as temperature, humidity, and airflow. By utilizing simulation techniques, engineers can better understand the complex interactions within these systems and optimize their performance for improved cooking efficiency and quality. A study by
| [14] | Wang, Z., Kim, P., & Lee, J. (2021). User acceptance of simulated robot-assisted cooking systems integrated with IoT technology. Journal of Intelligent Systems, 29(4), 412-429. |
[14]
investigated user acceptance and usability of simulated robot-assisted cooking systems. Findings indicated positive feedback from users, highlighting the convenience and efficiency of such systems in the kitchen.
In a study by
| [13] | Wang, Y., Lee, H., & Choi, J. (2019). Food texture modeling and simulation for robot-assisted cooking. International Conference on Human-Computer Interaction. |
[13]
, researchers investigated user acceptance of simulated robot-assisted cooking systems integrated with IoT technology. The research findings showed positive feedback from users, indicating high satisfaction with the convenience and precision of the cooking process.
2.3. Advantages and Disadvantages of Existing Systems
The existing systems have little advantages compared to the proposed system in terms of;
1. Cost: The existing system is not cost intensive like RobotEarth because it is an all-in-one device. Consequently, there is no need for training of data.
2. Reliability: They are reliable in terms of cooking a precise food.
But the major disadvantages of the existing systems are:
(1) Scalability: There is no room for expansion, it can only cook one particular food item at a time.
(2) Mobility: The precision cook is motionless, it does not have knowledge of its own to make decisions.
(3) Human Assistance: Since the training of data is not involved in this scenario, it requires human assistance to direct the precision robot cook on what to do at any time.
These drawbacks are addressed in the new system “IoT precision cooking robot” which is equipped with actuators that enable the robot to move from one place to another in the kitchen to collect the required ingredients for every meal, micro-controllers and sensors to detect food ingredients. Also in terms of scalability, the robot can be trained with other data (recipes) for cooking other meals rather than Nigerian meals only. The only disadvantage of this precision cooking robot is that, it is cost intensive based on the procurement of actuators, sensors, micro-controllers and programming ambiguity.
3. Materials and Methods
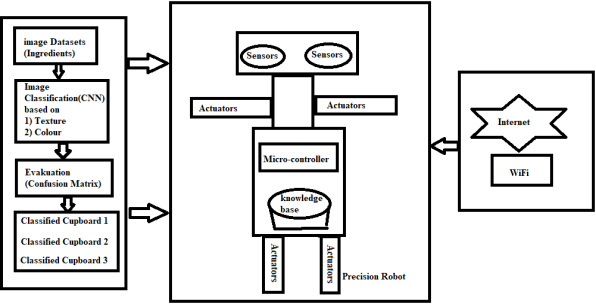
This section discusses the processes involved in developing a kitchen assisted precision robot. The processes involved is shown in
figure 2. The task involves the data training of the ingredients on the classified cupboards containing the recipes for cooking major Nigerian cuisines. The training is done with convolutional neural network based on texture and colour of the ingredients. The second process is by equipping the robot with actuators and sensors and linked it to the micro-controller which enables the users to do the operation of controlling the robot from anywhere through the internet of things.
Figure 2. Architecture of the System.
3.1. Algorithm of the System
Step 1: Upload images of the ingredients
Step 2: Start (Convolutional Neural network) model
Step 3: Input dataset;
Step 3: Annotate the dataset.
Step 4: Split the dataset into testing and training sets
Step 5: if ingredient for cupboard 1 _detected=” True”:
Step 6: if ingredient for cupboard 2 _detected=” True”:
Step 7: if ingredient for cupboard 3_detected=” True”:
Step 8: Alert.send_alert ("All ingredients detected!")
Step 9: else: Go to line 2.
3.2. Data Training with Convolutional Neural Network (CNN)
The data training in convolutional neural network involves six steps
1. The input layer receives the input data in form of the various images of the ingredients
2. Application of convolutional filters to detect the features of the ingredients
3. Introduction of a non-linearity on the images because of multiple features on the ingredients
4. Reduction of spatial features to obtain only vital information from the ingredients
5. Conversion of the pooled feature maps into a vector
6. Connects every neuron to each of the other neuron
The data training (images, text like ingredients or recipes) was done using convolutional neural networks with 25 datasets comprising the recipes. The data training is to focus on colour and texture of the ingredients with convolutional neural network as shown in
figure 2. The data includes; palm oil, meat, ground eguzi, salt, fish, rice, stock fish, ground pepper, onions, maggi, white beans, ukazi leaf, etc. After the training is done, the ingredients are placed on the smart cupboards for easy recognition by the IoT-assisted precision cooking robot.
1. Classified Cupboards Equipped with Sensors
The labels for the various ingredients are tagged on the cupboards for easy identification by the IoT-assisted precision cooking robot classified as ingredients 1, 2, 3, 4, 5 and so on.
(a) Classified Cupboard 1
As shown in the
figure 2, cupboard 1 represents the ingredients for preparing Yoruba meals. The cupboard is equipped with a sensors.
(b) Classified Cupboard 2
Cupboard 2 is for Igbo ingredients for preparing selected meals and soups. The cupboard is also equipped with sensors.
(c) Classified Cupboard 3
As shown in
figure 2, the cupboard 3 is where the ingredients for preparing Hausa meals are kept. This cupboard is equipped with sensors.
The three cupboards are classified into three segments which depicts each ingredients for a particular meal in Hausa, Igbo and Yoruba.
2. The Robot
The robot is equipped with the following features:
(1) Actuators
Actuators are responsible for moving the robot’s arm and other components of the robot. These includes motors, servos, pneumatic actuators depending on the design and requirements of the robot.
(2) Sensors
These include various types such as cameras, proximity cameras, measuring sensors to determine the quantity of ingredients, for detecting obstacles etc.
(3) Processing Unit
The processing unit, often a micro-controller or a computer processes data from sensors, executes control algorithms and coordinates the robot’s movements and actions.
3.3. The Database (Knowledgebase)
The database stores information such as recipes (ingredients) as labeled in
Figure 3, cooking instructions and user preferences. This allows the robot to access and retrieve relevant information during the cooking process.
3.4. Convolutional Matrix
The max pooling selected for each input and output element could be expressed in the matrix as shown in Equations (
1).
where vec x represents the input vector which is the input feature map and in this case, the images or an intermediate representation; S(x) represents the transformation function; vec y represents the output vector, which is the transformed feature map after applying the operation S(x).
3.5. System Analysis
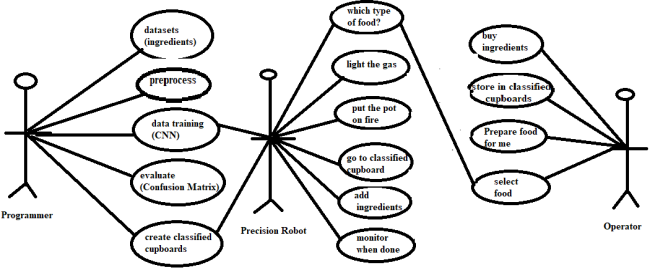
As shown in
Figure 4, the system analysis is done using the object oriented analysis and design methodology. The unified modeling language (UML) of USE Case diagram was used to show the interaction of the various actors. These actors are the programmer who trains the data with convolutional neural network (CNN) and evaluates the accuracy of the model using the confusion matrix, the precision robot and the operator/user who purchases the ingredients and stores in the appropriate classified cupboards. The cupboards could also be expanded to accommodate other ingredients since the recipes for cooking other delicacies are almost the same.
Figure 4. USE CASE Diagram.
3.6. Classification Accuracy Calculations
The classification accuracy of the training as shown in equation (
2) given as
(2)
Where TP = true positive- The number of samples that were correctly predicted as positive. TN = true negative - The number of samples that were correctly predicted as negative, FP = false positive - The number of samples that were incorrectly predicted as positive and FN = false negative - The number of samples that were incorrectly predicted as negative.
Precision, Recall and F1_Score Calculations
Equations (
3) and (
4) are used to calculate the precision accuracy and recall of the training of data for the smart cook robot.
Training Population = 25 Ingredients.
4. Results
The design of IoT -assisted precision cooking robot is a design that enables a moving robot not a stationed robot to prepare all kinds of food delicacies of Nigeria in Yoruba, Igbo and Hausa. The smart robot cook is equipped with facilities such as actuators to enhance movement of the robot around the kitchen. The cameras are incorporated to the camera for vision and also to enable the operator/user to monitor the kitchen. This smart cook is enabled by internet of things which gives the user or operator the leverage to remotely manipulate and operate the robot anywhere, anytime to prepare foods. The robot is also equipped with sensors, this capability enables the precision cooking robot to identify the ingredients in the classified cupboards namely; cupboard 1, cupboard 2 and cupboard 3. Most importantly, in this work is the training aspect, where the robot is trained to adapt with the recipes for preparing the various cuisines. This training is necessary so that at any given point, the kitchen smart robot could identify the time interval for adding each item ingredient during the cooking, the quantity of ingredients to be added and when the food should be put out of fire.
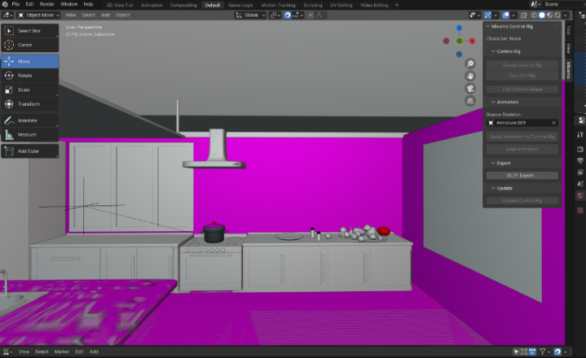
Figure 5. Simulated Kitchen environment.
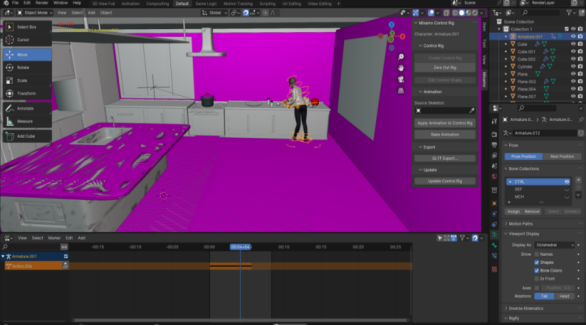
Figure 6. Simulated Kitchen with the robot preparing the ingredients.
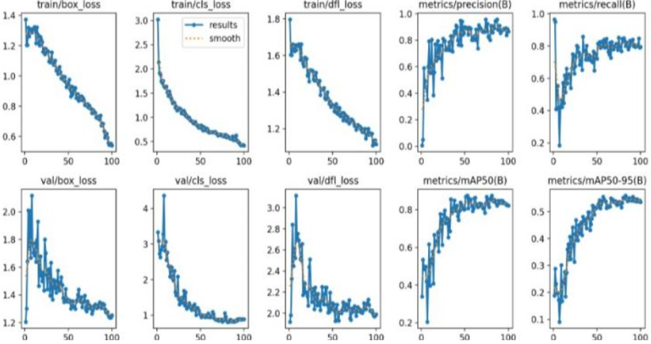
Figure 7. The Training Result.
Table 1. Summary of the Training Accuracy using Confusion Matrix.
| Texture | Colour |
Classification Accuracy | 92% | 92% |
Precision | 95% | 95% |
Recall | 95% | 94% |
Total Samples used (recipes) = 25
Tp = 23, TN =1, FN = 1, FP = 1 using equations 1, 2 and 3 the accuracy, recall and precision of the data training results were calculated as shown in
table 1. The confusion matrix was employed to evaluate the performance of the classification model. It shows how well the model can predict and matches the actual class labels.
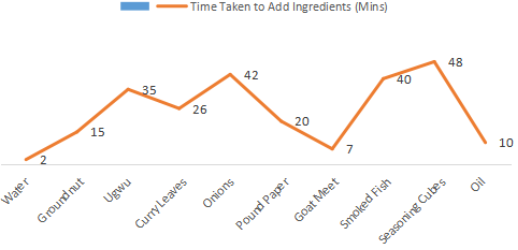
Figure 8. Diagrammatic Representation of Time in Adding Ingredients in Cooking Miyan Gida.
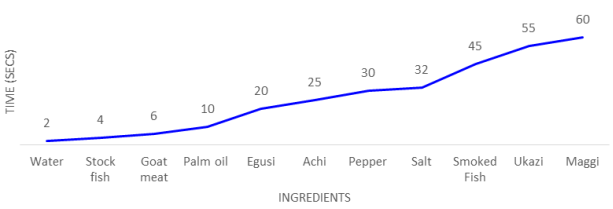
Figure 9. Diagrammatic Representation of Time in Adding Ingredients in Cooking Egusi Soup.
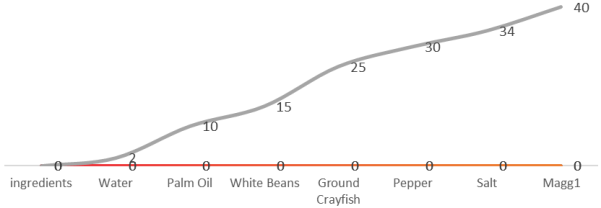
Figure 10. Diagrammatic Representation of Time in Adding Ingredients in Cooking Gbegiri Soup.
Table 2. Result Comparison with Existing Precision Cooking Robot.
| Accuracy | Mobility |
IoT-Assisted Precision | 92% | Motion |
RobotEarth | 82% | Motionless |
From
Table 2, a comparison of the new system was compared with existing system of RobotEarth and the accuracy of the new system outweighs the existing system. RobotEarth is a cooking precision robot just like a cooking pot that ingredients are added intermittently but in the new system, the robot does every work by itself.
5. Discussion
The
Figure 5, shows the simulated kitchen environment where the robot operates to cook the foods as specified in the classified cupboards. The classified cupboards contain the ingredients for cooking any stipulated meals as specified by the chef or the operator. The simulated kitchen is equipped with gadgets such as the gas cooker, the washing basins, pots, spoons as utensils and the classified cupboards. The
Figure 6 shows the operations carried out by the kitchen robot in the simulated kitchen. The robot is performing the tasks assigned to it to do. The IoT assisted precision cooking robot adds ingredients to the pot on the fire based on the prescribed time assigned to it consecutively until when the food is done. The
Figure 7 shows the training results with the convolutional neural network. It depicts the metrics of evaluation of the model and its corresponding training results. As the training evolves, training accuracy increases, the loss decreases for both the training and validation processes. Additionally, as accuracy improves, the model’s ability to correctly predict (precision) also increases. The front row graphs, that is the first five are attributed to the training loss accuracy, precision and recall while the back row graphs in the same
Figure 7 show the validation accuracy and the mean average precision as the training evolves. As the training accuracy increases, the loss decreases for both the training and validation processes. Additionally, as accuracy improves, the model’s ability to correctly predict (precision) also increases.
Figure 8 shows the various time the kitchen assisted precision robot takes in adding ingredients in cooking miyan gida soup. It took a total of forty eight (48) minutes to add the ingredients in the pot. This involves the adding of water in the pot in two (2) minutes, adding of goat meat in 7 minutes, adding of palm oil in 10 minutes, adding of ground groundnut in 15 minutes, adding of ground pepper in 20 minutes etc. The robot allows the food to steam for the next 5 minutes before switching on the gas cooker. The
Figure 9 shows the time it took the kitchen assisted precision robot to cook a popular food called egusi soup. Egusi soup is a popular food among the Igbo ethnic group in Nigeria. It took the robot 2 minutes to add water in the pot, 4 minutes to add stock fish, another 6 minutes to add goat meat. Adding of palm oil took 10 minutes, adding of egusi took 20 minutes, adding of achi took 20 minutes, adding of pepper took 30 minutes and so on. In all, it took the kitchen assisted precision robot a total of 55 minutes to add the ingredients on the list. Finally the robot allows the food to steam for 5 minutes before it was done.
In cooking a popular Yoruba food called gbegiri as depicted in
Figure 10, the kitchen assisted robot took 2 minutes before adding water in the pot, 10 minutes before adding palm oil, 15 minutes before adding ground white beans, 25 minutes before adding ground crayfish, 30 minutes before adding pepper, 34 minutes before adding salt and 40 minutes before adding maggi.
6. Conclusions
The Internet of things precision cooking robot is an innovation that should assist families prepare their meals anytime, anywhere. With the Internet of things which is a conglomeration of embedded software and hardware to exchange data and information, one could stay at the comfort of his or her house, the work place and alert the smart cook to prepare meals of his or her choice while monitoring the process. In designing the smart cook robot, Arduino micro-controllers, cameras and sensors were employed which is programmed to control the activities of the robot during cooking. The smart robot cook was trained rigorously in the routine recipes so that the robot could master to when to add each of the ingredients at a particular time. The sensor equipped gadgets is a boost to sensitivity of the smart robot cook to maneuver.
Abbreviations
CNN | Convolutional Neural Network |
IoT | Internet of Things |
UML | Unified Modeling Language |
OOADM | Object Oriented Analysis and Design Methodology |
WiFi | Wireless Fidelity |
TP | True Negative |
FP | False Positive |
TN | True Negative |
FN | False Negative |
Acknowledgments
We wish to acknowledge the Vice Chancellor of Abia State University Professor Ndukwe James Okeudo for his untiring efforts in promoting research and publications in the institution. Acknowledgement also goes to the dean of Faculty of Physical Sciences Professor Bright Okorie Osu for his support towards the development of academic staff in the faculty.
Author Contributions
Odikwa Ndubuisi Henry: Writing - original draft, Writing - review & editing
Onwubiko Davidson Chisom: Data curation, Visualization, Writing - review & editing
Ukabuiro Ikenna Kelechi: Conceptualization, Formal Analysis, Investigation, Methodology
Agomah Stella Adaugo: Conceptualization, Resources, Software, Supervision
Conflicts of Interest
The authors declare no conflicts of interest.
References
| [1] |
Beetz, M., Tenorth, M., Mosenlechner, L., and Klank, U. (2011). RoboEarth-a world wide web for Robots. IEEE Robotics and Automation Magazine, 18(2), 69-82.
|
| [2] |
Chen, Y., Lin, Y., & Wang, J. (2017). IoT-enabled smart kitchen system for automated meal preparation. IEEE Transactions on Industrial Informatics, 13(5), 2051-2062.
|
| [3] |
Jung, S., Kim, H., & Park, J. (2017). The role of IoT and robotics in precision cooking systems: A review. Automation in Culinary Science, 12(3), 55-72.
|
| [4] |
Jonathan Blutinger, Alissa Tsai, Erika Storvick, Gabriel, Elise and Noà Samarelli. (2023). Precision cooking for printed foods via multiwavelength lasers. Research Square. 1-14.
|
| [5] |
Kim, M., Zhang, L., & Chen, X. (2019). Integration of IoT-enabled robotic arms for precision cooking in smart kitchens. IEEE Internet of Things Journal, 7(6), 5012-5025.
|
| [6] |
Lee, S., Choi, B., & Lim, K. (2018). IoT-enabled robotic cooking system with real-time monitoring and automation. Sensors & Actuators: A. Physical, 278, 150-163.
|
| [7] |
Li, H., Zhao, T., & Wang, R. (2018). Development of an IoT-powered smart kitchen system for automated cooking. Journal of Smart Home Technologies, 15(2), 210-223.
|
| [8] |
Moley Robotics. (2015). The World’s First Robotic Kitchen. Retrieved from
https://www.moley.com/
|
| [9] |
Nakajima, T., Sato, Y., & Fujiwara, K. (2013). Precision cooking using IoT sensors for accurate temperature control. Culinary Science Journal, 10(2), 112-129.
|
| [10] |
Odikwa. H. N, Francis, C. E., and Osaki, M. T. (2025). A Scalable Real-Time IoT Agricultural Farm Sensor-Based Application Monitoring System. GVU Journal of Science, Health and Technology. 10(1), 102-105.
|
| [11] |
Park, Y., Lee, D and Kim, S. (2020). Challenges and Future Directions in Domestic Service Robots. A Review. International Journal of Advanced Robotic Systems. 17(1), 1-15.
|
| [12] |
Srinivasa, S. S., Ferguson, D., Berenson, D., Collet, A., Diankoy, R., Helfrich, C. (2013). HERB Cutler for manipulation reset autonomous.
|
| [13] |
Wang, Y., Lee, H., & Choi, J. (2019). Food texture modeling and simulation for robot-assisted cooking. International Conference on Human-Computer Interaction.
|
| [14] |
Wang, Z., Kim, P., & Lee, J. (2021). User acceptance of simulated robot-assisted cooking systems integrated with IoT technology. Journal of Intelligent Systems, 29(4), 412-429.
|
| [15] |
Zhang, L., Chen, Y., & Wang, T. (2020). Integration of IoT sensors for monitoring and adjusting cooking parameters in real-time. IEEE Sensors Journal, 20(3), 2105-2116.
|
| [16] |
Zhang, X., Wang, R., & Li, J. (2019). Evaluating the efficiency and accuracy of IoT-enabled precision cooking systems. IEEE Transactions on Consumer Electronics, 65(4), 4071-4080.
|
| [17] |
Zheng, P., Lin, J., & Wei, H. (2019). Machine learning algorithms for predicting optimal cooking settings in automated kitchens. Artificial Intelligence in Smart Home Technologies, 24(1), 75-93.
|
Cite This Article
-
APA Style
Henry, O. N., Chisom, O. D., Kelechi, U. I., Adaugo, A. S. (2025). IoT-assisted Precision Cooking Robot for Nigerian Cuisines: A CNN-based Approach. American Journal of Artificial Intelligence, 9(1), 80-90. https://doi.org/10.11648/j.ajai.20250901.18
 Copy
|
Copy
|
 Download
Download
ACS Style
Henry, O. N.; Chisom, O. D.; Kelechi, U. I.; Adaugo, A. S. IoT-assisted Precision Cooking Robot for Nigerian Cuisines: A CNN-based Approach. Am. J. Artif. Intell. 2025, 9(1), 80-90. doi: 10.11648/j.ajai.20250901.18
Copy
|
Download
AMA Style
Henry ON, Chisom OD, Kelechi UI, Adaugo AS. IoT-assisted Precision Cooking Robot for Nigerian Cuisines: A CNN-based Approach. Am J Artif Intell. 2025;9(1):80-90. doi: 10.11648/j.ajai.20250901.18
Copy
|
Download
-
@article{10.11648/j.ajai.20250901.18,
author = {Odikwa Ndubuisi Henry and Onwubiko Davidson Chisom and Ukabuiro Ikenna Kelechi and Agomah Stella Adaugo},
title = {IoT-assisted Precision Cooking Robot for Nigerian Cuisines: A CNN-based Approach
},
journal = {American Journal of Artificial Intelligence},
volume = {9},
number = {1},
pages = {80-90},
doi = {10.11648/j.ajai.20250901.18},
url = {https://doi.org/10.11648/j.ajai.20250901.18},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajai.20250901.18},
abstract = {Many households are finding it difficult to prepare meals for the family because of the enormous tasks involved and encountered during cooking. Coupled with office work, business activities and other engagements by human beings have made it nearly possible for families to rely on junk meals which are not healthy sometimes too to human health and moreover cost intensive. This research article is geared towards designing an Internet of things kitchen assisted precision cooking robot that can cook different kinds of meals with a case study of Nigerian major ethnic cuisines. The kitchen robot is equipped with sensors, cameras, actuators and embedded with a micro-controller. The program control module was done using tensorFlow and blender 7.0 as the programming application packages with internet of things features to enable pervasive operations by the users. The methodology adopted in the design is the object oriented analysis and design methodology (OOADM) using the unified modeling languages (UML) of USE Case diagram. In this research, 25 datasets comprising the various recipes for cooking Nigerian cuisines were trained using Convolutional Neural Network (CNN) for image processing and classifications while the confusion matrix was used to evaluate the performance of the classification. The classified images from the recipes were placed on classified cupboards designated as cupboard 1, cupboard 2 and cupboard 3 respectively for easy identification by the robot. The results got from the training showed that the kitchen assisted precision robot was able to classify and detect recipes at an accuracy of 92%, making it a more reliable tool in precise cooking.
},
year = {2025}
}
Copy
|
Download
-
TY - JOUR
T1 - IoT-assisted Precision Cooking Robot for Nigerian Cuisines: A CNN-based Approach
AU - Odikwa Ndubuisi Henry
AU - Onwubiko Davidson Chisom
AU - Ukabuiro Ikenna Kelechi
AU - Agomah Stella Adaugo
Y1 - 2025/06/30
PY - 2025
N1 - https://doi.org/10.11648/j.ajai.20250901.18
DO - 10.11648/j.ajai.20250901.18
T2 - American Journal of Artificial Intelligence
JF - American Journal of Artificial Intelligence
JO - American Journal of Artificial Intelligence
SP - 80
EP - 90
PB - Science Publishing Group
SN - 2639-9733
UR - https://doi.org/10.11648/j.ajai.20250901.18
AB - Many households are finding it difficult to prepare meals for the family because of the enormous tasks involved and encountered during cooking. Coupled with office work, business activities and other engagements by human beings have made it nearly possible for families to rely on junk meals which are not healthy sometimes too to human health and moreover cost intensive. This research article is geared towards designing an Internet of things kitchen assisted precision cooking robot that can cook different kinds of meals with a case study of Nigerian major ethnic cuisines. The kitchen robot is equipped with sensors, cameras, actuators and embedded with a micro-controller. The program control module was done using tensorFlow and blender 7.0 as the programming application packages with internet of things features to enable pervasive operations by the users. The methodology adopted in the design is the object oriented analysis and design methodology (OOADM) using the unified modeling languages (UML) of USE Case diagram. In this research, 25 datasets comprising the various recipes for cooking Nigerian cuisines were trained using Convolutional Neural Network (CNN) for image processing and classifications while the confusion matrix was used to evaluate the performance of the classification. The classified images from the recipes were placed on classified cupboards designated as cupboard 1, cupboard 2 and cupboard 3 respectively for easy identification by the robot. The results got from the training showed that the kitchen assisted precision robot was able to classify and detect recipes at an accuracy of 92%, making it a more reliable tool in precise cooking.
VL - 9
IS - 1
ER -
Copy
|
Download