Abstract
In the early stages of new vehicle development, while the maximum theoretical performance of the AC system can be obtained through Amesim software simulation, the real performance heavily relies on calibration control. This calibration process, typically spanning 10 months and including up to 2 months of environment chamber tests, is time-consuming and can delay the vehicle's launch. To address this issue, "virtual" AC calibration technology has been developed. This technology offers several advantages: Shortened Calibration Cycle: By utilizing virtual calibration, the time-consuming process of physical prototype testing is significantly reduced, allowing for a faster turnaround and quicker vehicle launch. Performance Assurance: The virtual AC calibration method ensures that the AC system meets the required performance standards, as it captures essential features of AC characteristics at different development stages. Cost-Effectiveness: The virtual calibration method is cost-effective, as it reduces the need for extensive physical testing and allows for easy realization of the final functional on-road test before the vehicle's Start of Production (SOP). Prototype for Future Programs: This new method serves as an AC calibration prototype for any future vehicle programs, further reducing the total AC system development cost and cycles. In summary, the "virtual" AC calibration technology is a valuable tool in the vehicle development process, offering a solution to the time-consuming and costly traditional calibration methods, while ensuring performance requirements are met and reducing overall development costs and cycles for future programs.
|
Published in
|
Automation, Control and Intelligent Systems (Volume 13, Issue 1)
|
|
DOI
|
10.11648/j.acis.20251301.11
|
|
Page(s)
|
1-11 |
|
Creative Commons
|

This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited.
|
|
Copyright
|
Copyright © The Author(s), 2025. Published by Science Publishing Group
|
Keywords
Air Conditioning System, Virtual Calibration, The Grade of Maturity, Calibration Cycle, Thermal Sensation
1. Introduction
At present, the air conditioning system (AC) accounts for about 40% of the total energy consumption of electric vehicles (EV) and is the most important auxiliary system for vehicles. In the year of 2022 winter, Magazine Autohome conducted a winter road test at -30°C using the extended range and plug-in model vehicles to evaluate the driving range changes affected by the controlled cabin interior temperature. The results indicated that only through the reduction of AC energy consumption, the pure EV driving range can be extended, however, doing so it may lead to a very uncomfortable cabin interior temperature, for example, Haval H6 of 3.1°C. Also, comparing the cruising ranges in two different cold temperatures of two locations (Beijing and Neimeng ), the pure EV driving range were drastically different. It can be seen from
Table 1 below that with the help of combustion engine of Extended-Range HEV and larger-sized of battery of Plug-in HEV, the EV driving ranges are longer than that of pure EV as demonstrated in Ideal L8 Extende-Range and other PHEVvehicles. Besides the longer cruising range, the warmer and comfortable cabin temperature can also be obtained for those Extended-Range and PHEV vehicles than pure EVs. The pure EV driving range is reduced for colder environment. Since Neimeng’s weather was colder than that of Beijing’s, the EV driving range is of course lower than that in Beijing. For example, Ideal L8’s EV driving range in Neimeng is only 60.25% of that in Beijing. Overall, the winter low temperature environment has a significant impact on the pure electric range of the vehicle
| [1] | Cvok, I., Ratkovic, I., and Deur, J., "Optimization of Control Parameters of Vehicle Air-Conditioning System for Maximum Efficiency," SAE Technical Paper 2020-01-1242, 2020, https://doi.org/10.4271/2020-01-1242 |
[1]
. The working status of the AC system also affects the pure EV range tremendously. Hence, the calibration control of the AC system is particularly important in this aspect.
Cvok, I., Ratkovic, I., and Deur, J.
| [1] | Cvok, I., Ratkovic, I., and Deur, J., "Optimization of Control Parameters of Vehicle Air-Conditioning System for Maximum Efficiency," SAE Technical Paper 2020-01-1242, 2020, https://doi.org/10.4271/2020-01-1242 |
[1]
optimizied the control parameters of vehicle air-conditioning system for maximum efficiency. Y. Wang and Z. Zhou
| [2] | Y. Wang and Z. Zhou, "Automatic Air Conditioner Controller Design of Automobile Based on Sensor," 2020 3rd International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Shenzhen, China, 2020, pp. 731-734, https://doi.org/10.1109/AEMCSE50948.2020.00161 |
[2]
did the automatic air conditioner controller design of automobile based on sensor. They used the air conditioner sensor or control parameters which in the vehicle. In this paper, it will introduced an new method which is the preliminary AC system calibration control using simulation tool can be applied to evaluate the total energy consumption of the vehicle
| [2] | Y. Wang and Z. Zhou, "Automatic Air Conditioner Controller Design of Automobile Based on Sensor," 2020 3rd International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Shenzhen, China, 2020, pp. 731-734, https://doi.org/10.1109/AEMCSE50948.2020.00161 |
[2]
. This article introduces the PID control method, and by using virtual calibration technology to optimize the PID control strategy for improving calibration efficiency and meeting customer comfort requirements.
The PID control technology is an advanced control method for ensuring that the air conditioning system can efficiently and accurately achieve the set temperature. PID stands for Proportional, Integral, and Derivative, and these three elements work together in the control system to minimize the deviation between the actual temperature and the set temperature.
Proportional control (P): Based on the deviation between the current temperature and the set temperature, proportional control immediately generates an output proportional to the deviation to try to correct it. The proportional coefficient (Kp) determines the sensitivity of the output to the deviation.
Integral control (I): Integral control considers the cumulative effect of temperature deviations over a period of time. If there is a persistent deviation in the system (even a small one), integral control gradually increases its output to eliminate this cumulative deviation. The integral time constant (Ti) determines the response speed of integral control.
Derivative control (D): Derivative control predicts future temperature deviations and adjusts the output based on the rate of change of the deviation. If the deviation is rapidly increasing or decreasing, derivative control responds in advance to prevent further expansion of the deviation. The derivative time constant (Td) determines the predictive ability of derivative control.
PID control is a common form of feedback control, and its formula can be expressed as:
(1)
Where,
u(
t) is the output of the controller;
e(
t) is the error, which is the difference between the set point and the actual value;
Kp is the proportional gain;
Ki is the integral gain;
Kd is the derivative gain;
is the integral of the error, which represents the cumulative sum of all errors from time 0 to time
t.
is the derivative of the error with respect to time, which represents the rate of change of the error. The purpose of the PID controller is to adjust these coefficients so that the output can minimize the error as quickly as possible, reach the set value, and maintain the balance between system stability and response speed
| [3] | Li Ruiqing, Zhang Rongbiao, Bai Shoujun, st. Application of Fuzzy PID in Temperature Control of Automobile Air Conditioner [J]. Microcomputer Information (Embedded and SOC), 2008, 24(2): 235-237. |
[3]
.
In an air conditioning system, the PID controller receives actual temperature information feedback from temperature sensors and compares it with the set temperature to calculate the deviation value. Based on the deviation value and its rate of change, the PID controller adjusts the cooling or heating output of the air conditioning system to make the indoor temperature reach and stabilize near the set value as quickly as possible. This control method not only improves the comfort and energy efficiency of the air conditioning system but also helps to extend the service life of the AC system
| [4] | Wang Qing, Tang Liping, Ou yangwenbin. Energy-saving Air-conditioning Control Algorithm Based on Thermal Comfort [J]. Journal of Donghua University (Natural Science Edition), 2010, 36(1): 57-60. |
| [5] | LIU B L. Calibration Technology of Vehicle Powertrain Electronic Control System [M]. Beijing: China Machine Press, 2022. |
[4, 5]
.
The evaluation method for comfort adopts the Dynamic Comfort Evaluation approach, which refers to the state of comfortable thermal environment perceived by the human body under constantly changing environmental conditions. This state is not only related to the physical parameters of the environment such as temperature, humidity, wind speed, etc., but also influenced by various factors such as human activity level, clothing condition, and individual differences. Dynamic Thermal Comfort emphasizes the human body's ability to adapt and regulate in a changing thermal environment, as well as the comfortable feeling of the human body in such an environment. Currently, the dynamic comfort evaluation method is mainly based on Fiala comfort evaluation
| [6] | Fiala, D. Modelling the active system. In: Dynamic Simulation of Human Heat Transfer and Thermal Comfort (PhD thesis). Leicester, UK: IESD, De Montfort Univ., 1998, chapt. 4. |
[6]
. This evaluation method is typically based on Fiala's human thermal regulation model, which is a mathematical model used to simulate human thermal regulation, aiming to predict and assess thermal comfort of the human body under various environmental conditions. This model takes into account the heat transfer processes within the human body, including the transmission and lag effects of heat within body tissues. By simulating the transient heat and moisture transfer processes in the "environment-clothing-human" system, the Fiala model can more accurately quantify the comfort of clothing, providing a theoretical basis for the thermal functional design of clothing. Additionally, the model considers the lag effect of heat transfer within body tissues by establishing a human heat transfer wave equation, which is used to predict the influence of environmental and clothing parameters on the comfort of wearing clothes. It is mainly applied to the comfort evaluation of closed environments such as automobiles, involving multiple aspects such as the comfort of the seats, sound insulation effects, and thermal comfort inside the vehicle. Through this method, the comfort of automobiles can be evaluated more scientifically and accurately, providing important references and guidance for the design and manufacture of modern automobiles. The thermal sensation scale is typically divided into 7 levels, which are: Cold (-3), Cool (-2), Slightly Cool (-1), Neutral (0), Slightly Warm (+1), Warm (+2), and Hot (+3). These levels are used to describe the subjective perception of ambient temperature by the human body. During the optimization of comfort control programs, it is often the case that the differences between two versions of control parameters are so minor that it's difficult to subjectively judge their impact on comfort. To address this, the Fiala comfort evaluation is required to quantize comfort and enable the development of more reasonable control programs. This method allows us to objectively measure and compare the comfort levels provided by different control parameter sets, ensuring that the final control program optimizes the ride comfort for passengers.
2. Physical Model
A coupled subsystem model based on Amesim and MATLAB/Simulink is developed. Amesim establishes the thermal management architecture, including sub-models such as AC system, motor and battery system, water and coolant circuit, passenger compartment model, AC box model, etc. Also apply MATLAB/Simulink tool to establish an AC control model and achieve signal interaction through the establishment of an FMU(Functional mock-up unit)interface
| [7] | ZHANG P F, LU F, YANG X F, et al. Research on Model-Based Vehicle Calibration [J]. Auto Electric, 2018(3): 21-23. |
[7]
.
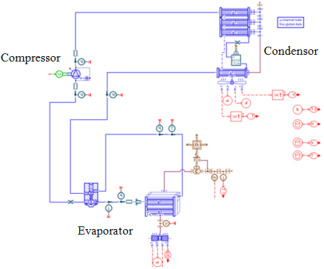
This article is based on a virtual calibration modeling of the AC system for a traditional fossil fuel powered vehicle. The AC system mainly consists of a condenser, compressor, and air conditioning assembly (evaporator, expansion valve), and refrigerant pipeline, as shown in
Figure 1.
Figure 1. Main components of AC mode.
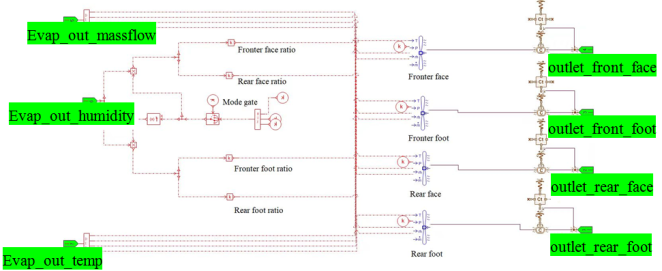
The AC box is an important connecting part of the AC assembly.
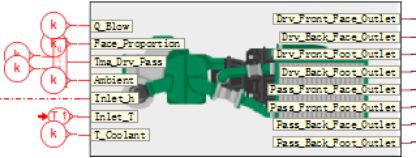
Figure 2 shows the detailed sub-model of the AC box, which takes on the opening of the air doors at different positions, and determines the flow ratio at different positions under operation modes such as face blowing and feet blowing. To display the effect, complex detailed sub-models of AC boxes can be encapsulated into Amesim, as shown in
Figure 3.
Figure 2. Partial sub model for AC box.
Figure 3. AC box model packaging.
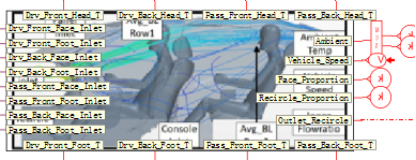
Build the 1D simulation model and divide the passenger compartment area into four parts: Driver Area, Passenger Area, Rear Left Area, and Rear Right Area. Each area is further divided into two parts: Upper and Lower Areas, totaling eight areas; The airflow exchange between each area is calculated through CFD simulation. Four working conditions were considered: Internal Circulation, External Circulation, Blowing Face, and Blowing Foot; Detail sub model of cabin is shown in
Figure 4.
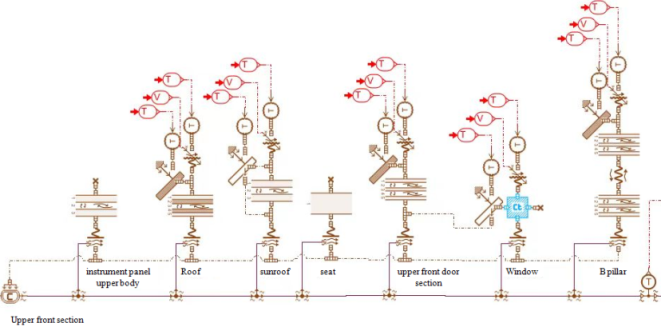
Figure 5 shows a partial cabin model which includes the lower part of the instrument panel upper body, the front roof, sunroof, front seats, upper part of the front doors and front door glass, pillars, and other components.
Figure 4. Detail sub model of cabin.
Figure 5. Partial cabin model.
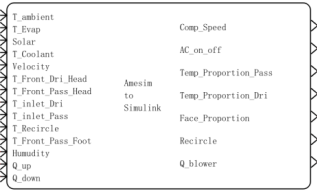
Figure 6 shows the control interface model in the main program in the Amesim. The control inputs are those related to the cabin and external environment like ambient temperature, vehicle speed, light intensity, etc. and the control outputs are those related to the compressor speed, air conditioning off/on signal, door ratio of two zone air conditioning, internal and external circulation door opening, blower air volume, etc.
Virtual calibration involves many calculations and the main control parameters for this calibration are:
1) Targeted temperatures such as set temperature, exterior temperature, cabin temperature, and factors affecting sunlight intensity;
2) Parameters for temperature damper calculation which include TAO and evaporator temperature influence factor. The TAO value is a key parameter used in the air conditioning control system to regulate the temperature inside the car, representing the blower air temperature required to maintain the car temperature at the set temperature.
3) Mode damper parameters relate to the switching points for blowing surface, blowing foot, and blowing foot modes;
4) Relationship curve parameters between blower voltage and TAO;
5) Internal and external circulation dampers parameters relate to the switching points and TAO values;
6) Relationship curve parameters between air conditioning low pressure and control current for compressor variable displacement control;
7) Frost and Pressure protection parameters.
Figure 6. Control model interface.
The accuracy of the sub-model is the prerequisite for a successful virtual calibration. The establishment of the model should meet the calibration requirements from the physical characteristics of the system and the performance parameters. For the purpose of serving as a base for future calibration optimization, the final calibration parameters will rely on the accuracy of the signals output and performance parameters of the model.
The established virtual calibration model should meet both accuracy and real-time application requirements. Therefore, the model should be appropriately modified or some other advanced technologies should be applied to fulfill these real-time application requirements.
The reusability of this successful real-time sub-models can be extended to other vehicle programs. For a new vehicle program development, besides cost benefits, the common sub-model platform can achieve much faster development turn-around time as well.
The efficiency of virtual calibration requires both software simulation and calibration hands-on testing knowledge, or to cooperate with simulation and calibration engineers to carry out calibration work. Currently, a collaborative model is adopted for rapid development
| [8] | WENIG M, ARTUKOVIC D, ARMBRUSTER C, et al. vRDE-A Virtual Extension of the RDE Tool Chain [C]// Internationals Stuttgarter Symposuim. Wiesbaden: Springer Vieweg, 2017: 365-381, https://doi.org/10.1007/978-3-658-16988-6_31 |
[8]
.
3. Air Conditioning Control Process
The control core of automatic AC is the accurate estimation of the head temperature in order to achieve the control of the system’s critical functional parameters such as outlet temperature, blower air volume, mode damper, temperature damper, blower voltage demand, and circulating damper, etc. When there is a cooling demand, it is to achieve a balance between the actual and target temperature of the evaporator, and use that balanced temperature to control the compressor’s speed demand.
The PID control is used throughout the entire calibration process which helps to optimize performance and ensure stability by adjusting the system parameters based on feedback.
In AC control, the objective of the controller is to regulate the indoor temperature to closely align with the set temperature. The controller's output denoted as Y governs the heating or cooling functionality of the AC. By adjusting Kp and Ki, the responsiveness and stability of the AC system can be optimized, ensuring that the indoor temperature various smoothly and remains within the specified range, thereby preventing excessive temperature fluctuations.
To enhance the operational efficiency and stability of the blower, a variable frequency speed control system is employed, alongside precise control utilizing PI control strategy. This involves altering the power supply frequency of the motor to control its rotational speed, thereby regulating the air volume and pressure of the blower. By continuously monitoring system errors and adjusting based on proportional and integral factors, the system is effectively controlled
| [9] | NEUSSER H J, KAHRSTEDT J, DORENKAMP R, et al. Die Euro-6-Motoren des Modularen Dieselbaukastens von Volkswagen [J]. Motorechnische Zeitschrift, 2013, 74(6): 440-444+447. |
[9]
.
The objectives of compressor control are to maintain the compressor's discharge pressure, temperature, and other parameters within the prescribed range, ensuring stable operation of the compressor. This enhances the compressor's energy efficiency ratio, thereby reducing energy consumption and operational costs.
Compressor PI control is analogous to blower PI control. Compressor PI control also involves real-time monitoring of the deviation between the actual output and the desired output of the system, and utilizes a PI controller for adjustment. However, specific implementations may undergo adjustments according to the compressor's characteristics and control requirements.
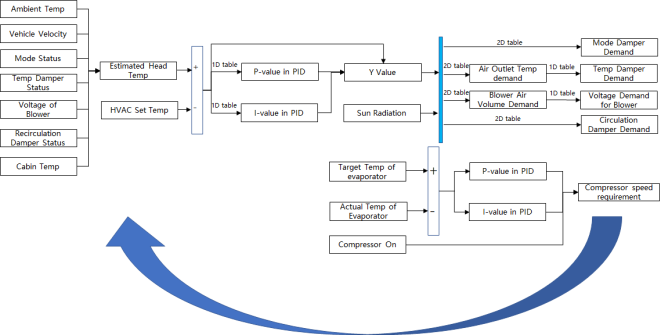
The AC system estimates the head temperature based on some external factors like vehicle speed and ambient temperature, as depicted in
Figure 7. To meet the demand for the AC system, defines the Y value by calculating the difference between the estimated head temperature and the set temperature. Additionally, considering the influence of solar radiation, a two-dimensional table is established to determine the requirements for mode dampers, blower voltage, recirculation dampers, and temperature dampers. When the system detects a need for cooling, it checks the evaporator’s target and actual temperature difference for PID control to achieve a relatively stable compressor speed request. Throughout this process, real-time feedback on the air conditioner's operating status is essential, and continuous estimation of the deviation between the head temperature and the AC set temperature is performed until the temperature within the passenger compartment stabilizes at the customer's desired setting, thereby completing the entire automatic air conditioning control sequence
| [10] | WANG Z J. Model Based Calibration of Common Rail Diesel Engine [D]. Kunming: Kunming University of Science and Technology, 2015. |
[10]
.
In this study, in order to achieve stable temperature control, PI control is used instead. Similarly, PI control is also used for the evaporator. The return-loop control demand also needs to be feedback in real-time according to the external environment condition, and the system output power needs to be adjusted during the entire process to achieve infinite cycle and dynamic balance until the air conditioning is turned off. The specific air conditioning control process is shown in
Figure 7 | [11] | Markofsky M, Schramm D. A Modular Framework for Virtual Calibration and Validation of Driver Assistance Systems [C] // International Munich Chassis Symposium. Springer Vieweg, Berlin, Heidelberg, 2024, https://doi.org/10.1007/978-3-662-68160-2_16 |
[11]
.
Figure 7. Auto air condition control process.
4. Virtual Calibration
The testing condition of AC control and optimization shown in
Table 1. Below was conducted under ambient temperature of 14°C along with a step piece-wise temperature profile of 22°C - 18°C - 20°C - 22°C - 24°C - 26°C - 22°C. The purpose of this test is to use PI control to meet the AC system requirements. In PI control
Kp and
Ki coefficient were used for AC’s output Y value calculation.
Kp is the proportional adjustment coefficient, which accelerates the system's response speed and improves the system's adjustment accuracy;
Ki is the integral adjustment coefficient to eliminate residuals.
Table 1. Test condition.
AmbientT (°C) | Solar (W/m2) | Velocity (km/h) | Blower state | T set (°C) | compressor |
14 | 500 | 80 | AUTO | 22-18-20-22-24-26-22 | AC ON |
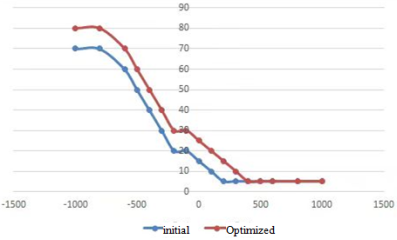
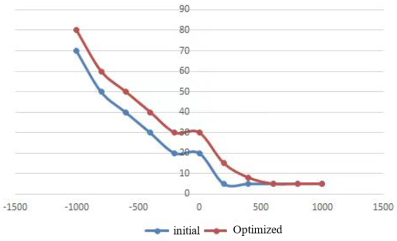
Take the temperature damper control using Amesim software as an example. Obtain temperature damper target (HOM_CdTmaCtrlTar) by checking blower control target (HOM_Y2FdTma-M) on driver’s side for both correlation coefficient of the head temperature difference calculated (HOM_Y2FdTma-X) and the coefficient relating the head temperature difference to the sunlight intensity (HOM_Y2FdTma-M) from PI calculation result (HOM_Yfd) and solar intensity (CSP-DrvSolarInten) lookup tables. The expected target of the outlet air temperature is usually set based on the comfort needs of passengers and environmental conditions and the initial coefficient values of HOM_Y2FdTma-X and HOM_Y2FdTma-M are [-1500 -1000 -500 0 500 1000 1500] and [90; 80; 70; …;0] respectively.
Kp and
Ki coefficient adjustment based on temperature damper control can be shown in the following
Figures 8 and 9. X.
Initial logic represents the initial Kp's strategy and Ki's strategy, as well as the initial adjustment of air volume based on sunlight intensity according to ambient temperature. The Y-axis represents warm air temperature, and the X-axis represents ambient temperature multiplied by 1000.
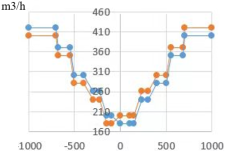
Figure 8 is a lookup table corresponding to sunlight intensity within [0, 1200] and ambient temperature, used to determine the supplementary curve for air volume.
Figure 9 has Y-axis representing air volume in m³/h and X-axis representing ambient temperature (note: the mislabeling of Y-axis as ambient temperature again is corrected here to clarify that it should only be on the X-axis).
Figure 10 is another lookup table corresponding to sunlight intensity within [0, 1200] and ambient temperature, used to confirm the supplementary curve for air volume. Blue represents the original sunlight compensation, yellow represents revised Sunlight Compensation for Airflow.
Compared with the initial state, optimization increases both Kp and Ki. However, excessively large Kp and Ki may cause system oscillation or instability. It is necessary to find a balance between response speed and stability. The actual optimization process may require multiple iterations and fine-tuning to achieve the desired control effect.
Figure 8. Kp's strategy optimization.
Figure 9. Ki’s strategy optimization.
Figure 10. Sunlight compensation for air volume.
During actual road tests, a significant deviation in the compensation of air volume due to sunlight may exist, specifically within a small compensation range where quick adjustments are difficult to make. By modifying the compensation mechanism for air volume, this issue can be effectively improved.
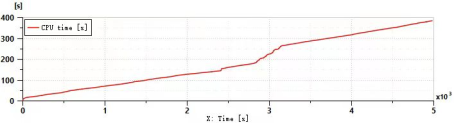
For the virtual calibration speed, while the actual vehicle testing time was 5000s, it only needs 400s of CPU time for virtual calibration, thus achieves a 12.5-fold improvement in computation speed, as shown in
Figure 11.
Figure 11. Virtual calibration speed.
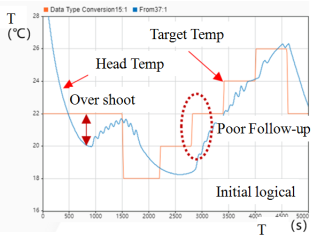
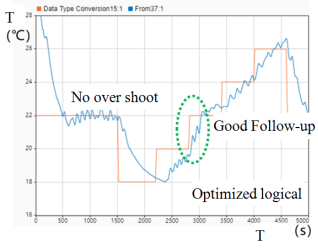
When the air conditioner starts the cooling process, it may detect a rapid cooling trend in the head temperature, and it is difficult to control temperature to an appropriate level that exactly meets the control target, resulting in an overshoot as shown in
Figure 12. The control logic adjusts and optimizes the AC’s
KP and
Ki as shown in
Figures 8 and 9, based on the difference between the monitoring head temperature. Increasing
Kp can respond to temperature changes faster, making the actual head temperature closer to the target head temperature. Increasing
Ki can effectively eliminate steady-state errors. Also, a reasonably good follow-up trend of monitoring head temperature to the controlled target set temperature can be obtained as shown in
Figure 12. and
Figure 13.
Figure 12. Head temperature of initial logic.
Figure 13. Head temperature of optimized logic.
5. Subjective Evaluation
Using the current production car “A” to test and compare the original control program and the optimized control program. The ambient temperature was 14°C, and the auto testing temperature profile of as 22°C - 18°C - 20°C - 22°C - 24°C - 26°C - 22°C. The temperature at the measuring point was required to be stable when switched. The vehicle speed was 45km/h, and the cabin air outlet mode were “blowing face” and “blowing foot” modes. The relative humidity inside the vehicle was 44.6%. The less crowed route around Baoding, Hebei Province was chosen for road testing. The road was flat and has low traffic flow, makes it more suitable for actual road testing. The road is shown in
Figure 14.
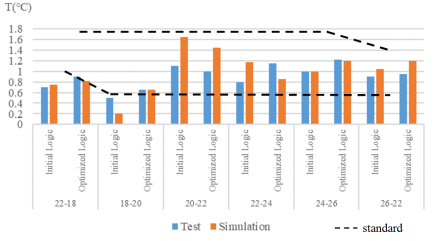
It was found that the main reason for poor temperature tracking between 22 and 18 °C was due to the poor vehicle condition. Nevertheless, through analysis, the improved control logic is still superior to the original logic, as shown in
Figure 15. where the temperature
T on the vertical axis of the graph represents the temperature difference between the experimental and simulated conditions. Within the range of 18-20, in terms of the agreement between testing and simulation results, optimized logic is better than initial logic. In the ranges of 20-22, 22-24, and 24-26, in terms of absolute values and differences, optimized logic is also superior to initial logic. Although there are relatively large errors between the experimental results and both initial logic and optimized logic during testing within the ranges of 20-22 and 22-24, the optimized logic in simulation still outperforms the initial logic, and all these errors are within a reasonable range.
It can be seen from
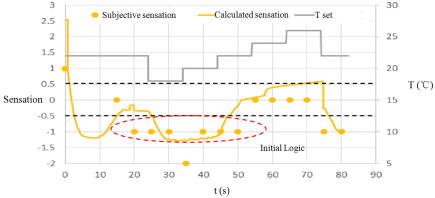
Figure 16 and
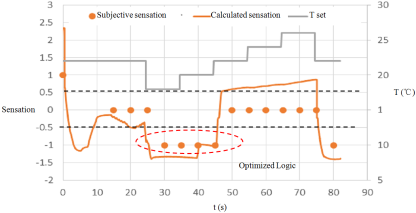
Figure 17 that testing results of Fiala comfort evaluation of thermal sensation are relatively in agreement with the simulation results with similar trends and most of the sensation values are within ±1. This refers to the relatively comfortable range for the human body, between slightly cool (-1) and slightly warm (+1). When the set temperature was 22°C, the human body's thermal sensation rapidly decreased from 2.5 to -1.2 within 10 minutes. The optimized logic could effectively stabilize customer comfort around Neutral (0), which is a relatively comfortable state for the human body. This was due to the effective adjustment of KP and KI for head temperature error control mentioned above. Next, the set temperature was 18°C, and the human body perceived it as cold, -1. By gradually increasing the set temperature, customer comfort gradually increased to near 0. When the temperature setting was adjusted from 26°C to 22°C, due to the decrease in set temperature, customers perceived a cool breeze. The optimized logic could make the subjective comfort decrease relatively slowly, and the effect was better.
Figure 15. Simulation and road test temperature tracking analysis.
Figure 16. Sensation of initial logic.
Figure 17. Sensation of optimized logic.
6. Conclusion
The application of virtual calibration technology in automotive engineering has significantly improved efficiency and reduced costs. The specific summaries are as follows:
1) Advantage of virtual simulation speed: A real vehicle test under a single driving condition takes 5000s (1.4 hours), while virtual calibration only requires 400s (7 minutes) of CPU time. The virtual simulation speed is more than ten times that of real vehicle testing, greatly shortening the development cycle.
2) Cost savings: One day's workload of simulation is equivalent to more than 10 days of testing in an environmental simulation laboratory. This saves approximately RMB 300,000 in testing costs (based on a calculation of RMB 3600 per hour for 8 hours over 10 days).
3) Analysis of air conditioning control models: Using virtual calibration, significant issues in the current air conditioning control model (at the early stage) can be analyzed. This helps identify and correct potential design flaws before physical prototype manufacturing.
4) Virtual calibration of head temperature: Virtual calibration of head temperature is achieved even when there are differences between the pre-production vehicle and the actual vehicle state. This demonstrates that virtual calibration technology has sufficient flexibility and accuracy to adapt to different vehicle states and environmental conditions. It further verifies the practical significance and application value of virtual calibration.
5) Improvement of control logic: After improvement through virtual calibration, the effectiveness of control logic can be enhanced. This shows that virtual calibration is not only used for analyzing problems but also for optimizing and improving control strategies.
Abbreviations
AC | The Air Conditioning System |
EV | Electric Vehicles |
Conflicts of Interest
The authors declare no conflicts of interest.
References
| [1] |
Cvok, I., Ratkovic, I., and Deur, J., "Optimization of Control Parameters of Vehicle Air-Conditioning System for Maximum Efficiency," SAE Technical Paper 2020-01-1242, 2020,
https://doi.org/10.4271/2020-01-1242
|
| [2] |
Y. Wang and Z. Zhou, "Automatic Air Conditioner Controller Design of Automobile Based on Sensor," 2020 3rd International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Shenzhen, China, 2020, pp. 731-734,
https://doi.org/10.1109/AEMCSE50948.2020.00161
|
| [3] |
Li Ruiqing, Zhang Rongbiao, Bai Shoujun, st. Application of Fuzzy PID in Temperature Control of Automobile Air Conditioner [J]. Microcomputer Information (Embedded and SOC), 2008, 24(2): 235-237.
|
| [4] |
Wang Qing, Tang Liping, Ou yangwenbin. Energy-saving Air-conditioning Control Algorithm Based on Thermal Comfort [J]. Journal of Donghua University (Natural Science Edition), 2010, 36(1): 57-60.
|
| [5] |
LIU B L. Calibration Technology of Vehicle Powertrain Electronic Control System [M]. Beijing: China Machine Press, 2022.
|
| [6] |
Fiala, D. Modelling the active system. In: Dynamic Simulation of Human Heat Transfer and Thermal Comfort (PhD thesis). Leicester, UK: IESD, De Montfort Univ., 1998, chapt. 4.
|
| [7] |
ZHANG P F, LU F, YANG X F, et al. Research on Model-Based Vehicle Calibration [J]. Auto Electric, 2018(3): 21-23.
|
| [8] |
WENIG M, ARTUKOVIC D, ARMBRUSTER C, et al. vRDE-A Virtual Extension of the RDE Tool Chain [C]// Internationals Stuttgarter Symposuim. Wiesbaden: Springer Vieweg, 2017: 365-381,
https://doi.org/10.1007/978-3-658-16988-6_31
|
| [9] |
NEUSSER H J, KAHRSTEDT J, DORENKAMP R, et al. Die Euro-6-Motoren des Modularen Dieselbaukastens von Volkswagen [J]. Motorechnische Zeitschrift, 2013, 74(6): 440-444+447.
|
| [10] |
WANG Z J. Model Based Calibration of Common Rail Diesel Engine [D]. Kunming: Kunming University of Science and Technology, 2015.
|
| [11] |
Markofsky M, Schramm D. A Modular Framework for Virtual Calibration and Validation of Driver Assistance Systems [C] // International Munich Chassis Symposium. Springer Vieweg, Berlin, Heidelberg, 2024,
https://doi.org/10.1007/978-3-662-68160-2_16
|
Cite This Article
-
APA Style
Xin, Z., Zhonghui, H., Donghai, S. (2025). Study on the Air Conditioning Comfort Virtual Calibration Technology. Automation, Control and Intelligent Systems, 13(1), 1-11. https://doi.org/10.11648/j.acis.20251301.11
 Copy
|
Copy
|
 Download
Download
ACS Style
Xin, Z.; Zhonghui, H.; Donghai, S. Study on the Air Conditioning Comfort Virtual Calibration Technology. Autom. Control Intell. Syst. 2025, 13(1), 1-11. doi: 10.11648/j.acis.20251301.11
Copy
|
Download
AMA Style
Xin Z, Zhonghui H, Donghai S. Study on the Air Conditioning Comfort Virtual Calibration Technology. Autom Control Intell Syst. 2025;13(1):1-11. doi: 10.11648/j.acis.20251301.11
Copy
|
Download
-
@article{10.11648/j.acis.20251301.11,
author = {Zheng Xin and Hu Zhonghui and Su Donghai},
title = {Study on the Air Conditioning Comfort Virtual Calibration Technology},
journal = {Automation, Control and Intelligent Systems},
volume = {13},
number = {1},
pages = {1-11},
doi = {10.11648/j.acis.20251301.11},
url = {https://doi.org/10.11648/j.acis.20251301.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.acis.20251301.11},
abstract = {In the early stages of new vehicle development, while the maximum theoretical performance of the AC system can be obtained through Amesim software simulation, the real performance heavily relies on calibration control. This calibration process, typically spanning 10 months and including up to 2 months of environment chamber tests, is time-consuming and can delay the vehicle's launch. To address this issue, "virtual" AC calibration technology has been developed. This technology offers several advantages: Shortened Calibration Cycle: By utilizing virtual calibration, the time-consuming process of physical prototype testing is significantly reduced, allowing for a faster turnaround and quicker vehicle launch. Performance Assurance: The virtual AC calibration method ensures that the AC system meets the required performance standards, as it captures essential features of AC characteristics at different development stages. Cost-Effectiveness: The virtual calibration method is cost-effective, as it reduces the need for extensive physical testing and allows for easy realization of the final functional on-road test before the vehicle's Start of Production (SOP). Prototype for Future Programs: This new method serves as an AC calibration prototype for any future vehicle programs, further reducing the total AC system development cost and cycles. In summary, the "virtual" AC calibration technology is a valuable tool in the vehicle development process, offering a solution to the time-consuming and costly traditional calibration methods, while ensuring performance requirements are met and reducing overall development costs and cycles for future programs.},
year = {2025}
}
Copy
|
Download
-
TY - JOUR
T1 - Study on the Air Conditioning Comfort Virtual Calibration Technology
AU - Zheng Xin
AU - Hu Zhonghui
AU - Su Donghai
Y1 - 2025/01/14
PY - 2025
N1 - https://doi.org/10.11648/j.acis.20251301.11
DO - 10.11648/j.acis.20251301.11
T2 - Automation, Control and Intelligent Systems
JF - Automation, Control and Intelligent Systems
JO - Automation, Control and Intelligent Systems
SP - 1
EP - 11
PB - Science Publishing Group
SN - 2328-5591
UR - https://doi.org/10.11648/j.acis.20251301.11
AB - In the early stages of new vehicle development, while the maximum theoretical performance of the AC system can be obtained through Amesim software simulation, the real performance heavily relies on calibration control. This calibration process, typically spanning 10 months and including up to 2 months of environment chamber tests, is time-consuming and can delay the vehicle's launch. To address this issue, "virtual" AC calibration technology has been developed. This technology offers several advantages: Shortened Calibration Cycle: By utilizing virtual calibration, the time-consuming process of physical prototype testing is significantly reduced, allowing for a faster turnaround and quicker vehicle launch. Performance Assurance: The virtual AC calibration method ensures that the AC system meets the required performance standards, as it captures essential features of AC characteristics at different development stages. Cost-Effectiveness: The virtual calibration method is cost-effective, as it reduces the need for extensive physical testing and allows for easy realization of the final functional on-road test before the vehicle's Start of Production (SOP). Prototype for Future Programs: This new method serves as an AC calibration prototype for any future vehicle programs, further reducing the total AC system development cost and cycles. In summary, the "virtual" AC calibration technology is a valuable tool in the vehicle development process, offering a solution to the time-consuming and costly traditional calibration methods, while ensuring performance requirements are met and reducing overall development costs and cycles for future programs.
VL - 13
IS - 1
ER -
Copy
|
Download